Ynlieding:
DM420A is in soarte fan twa-fase hybride stappenmotor bestjoerder, De oandriuwspanning wêrfan is fan 12VDC oant 36VDC.It is ûntworpen foar gebrûk mei 2-faze hybride steppermotor fan alle soarten mei 20mm oant 42mm bûtendiameter en minder dan 2.0A fazestroom.Dit circuit dat it oannimt is fergelykber mei it circuit fan servokontrôle wêrtroch de motor soepel kin rinne hast sûnder lûd en trilling.Hording koppel doe't DM420A rinne ûnder hege snelheid is ek gâns heger as de oare twa-fase driver, wat is mear, de posisjonearring accuracy is ek heger.It wurdt in soad brûkt yn middelste en grutte numerike kontrôle apparaten lykas curving masine, CNC masine, en kompjûter borduerwurk masine, packing masines ensafuorthinne.
Funksjes:
l Hege prestaasjes, lege priis
l Gemiddelde stromkontrôle, 2-fase sinusoïdale útfierstromsstasjon
l Supply voltage út 12VDC to 36VDC
l Opto-isolearre sinjaal I / O
l Overvoltage, ûnder spanning, overkorrekt, faze kortslutingsbeskerming
l 8 kanalen ûnderferdieling en automatyske idle-stream reduksje
l 8 kanalen útfier faze hjoeddeistige ynstelling
l Offline kommando ynfier terminal
l Motor koppel is besibbe mei snelheid, mar net besibbe mei stap / revolúsje
l Hege start snelheid
l Heech hording koppel ûnder hege snelheid
Elektryske spesifikaasje:
| Ynfier spanning | 12-36VDC |
| Ynputstroom | < 2A |
| Output hjoeddeistige | 0.44A- 2.83A |
| Konsumpsje | Konsumpsje:40w; |
| Temperatuer | Wurktemperatuer -10 ~ 45 ℃; Opslachtemperatuer -40 ℃ ~ 70 ℃ |
| Feuchte | Gjin kondensaasje, gjin wetterdruppels |
| gas | Ferbod op brânbere gassen en liedend stof |
| gewicht | 70G |
Pins opdrachten en beskriuwing:
1) Connector Pins konfiguraasjes
| Pin Funksje | Details |
| PUL +, PUL- | Pulssinjaal, PUL+ is it positive ein fan pulsynput pinPUL- is it negative ein fan pulsynput pin |
| DIR+, DIR- | DIR-sinjaal: DIR + is it positive ein fan rjochting ynfier pinDIR- is it negative ein fan rjochting input pin |
| ENBL+ | Aktivearje sinjaal: ENBL + is de positive ein fan rjochting ynfier pin.Dit sinjaal wurdt brûkt foar it ynskeakeljen/útskeakeljen fan de bestjoerder.Heech nivo foar it ynskeakeljen fan de bestjoerder en leech nivo foar it útskeakeljen fan de bestjoerder. |
| ENBL- | ENBL- is de negative ein fan rjochting ynfier pin.Meastentiids net ferbûn (ynskeakele) |
2) Pins wiring diagram:
PC's kontrôlesinjalen kinne aktyf wêze yn heech en leech elektrysk nivo.As it hege elektryske nivo aktyf is, wurde alle negative kontrôlesinjalen ferbûn mei GND.Wannear't lege elektryske nivo aktyf is, sille alle kontrôle positive sinjalen wurde ferbûn tegearre mei iepenbiere haven.Jou no twa foarbylden (Iepen samler & PNP), kontrolearje se asjebleaft:

Fig 1. Ynfierpoarte circuit (positive ferbining)
PC iepen connector útfier
Fig. 2 Ynfierpoarte circuit (negative ferbining)
PC PNP útfier
Opmerking: As VCC=5V, R=0
As VCC=12V, R=1K, ~1/8W
As VCC=24V, R=2K,~1/8W
R moat ferbine yn it kontrôle sinjaal diel.
3. Funksje kar (DIP-pins brûke om dizze funksje te berikken)
1) Micro stap resolúsje wurdt ynsteld troch SW 5,6,7,8 fan de DIP switch lykas werjûn yn de folgjende tabel:
| SW5 | ON | ÚT | ON | ÚT | ON | ÚT | ON | ÚT |
| SW6 | ON | ON | ÚT | ÚT | ON | ON | ÚT | ÚT |
| SW7 | ON | ON | ON | ON | ÚT | ÚT | ÚT | ÚT |
| Pulse/rev | 200 | 400 | 800 | 1600 | 3200 | 6400 | 12800 | 25600 |
| Micro | 1 | 2 | 4 | 8 | 16 | 32 | 64 | 128 |
2) Standstill hjoeddeistige ynstelling
SW4 wurdt brûkt foar dit doel.OFF betsjut dat de stilstân is ynsteld om de helte te wêzen fan 'e selektearre dynamyske stroom en ON betsjut dat stilstân is ynsteld om itselde te wêzen as de selektearre dynamyske stroom.
3) Output hjoeddeistige ynstelling:
De earste trije bits (SW 1, 2, 3) fan 'e DIP-switch wurde brûkt om de dynamyske stroom yn te stellen.Selektearje in ynstelling
It tichtst by de fereaske stroom fan jo motor
| SW1 | SW2 | SW3 | PEAK | RMS |
| ON | ON | ON | 0.44 A | 0.31 A |
| ÚT | ON | ON | 0,62 A | 0.44 A |
| ON | ÚT | ON | 0,74 A | 0,52 A |
| ÚT | ÚT | ON | 0,86 A | 0,61 A |
| ON | ON | ÚT | 1.46 A | 1.03 A |
| ÚT | ON | ÚT | 1.69 A | 1.20 A |
| ON | ÚT | ÚT | 2.14 A | 1.51 A |
| ÚT | ÚT | ÚT | 2,83 A | 2.00 A |
4) Semi-flow funksje:
Semi-flowfunksje is dat d'r gjin stappuls is nei 200 ms, de útfierstroom fan 'e bestjoerder wurdt automatysk fermindere nei 40% fan' e nominearre útfierstroom, dy't wurdt brûkt om motorhitte te foarkommen.
4. Pins fan motor en krêft:
| Motor en macht pins | 1 | A+ | Motors wiring | |
| 2 | A- | |||
| 3 | B+ | |||
| 4 | B- | |||
| 5, 6 | DC+ DC- | Streamtafier | Netzteil: DC12-36VDC De pykynputstroom kin net oant 2A wêze |
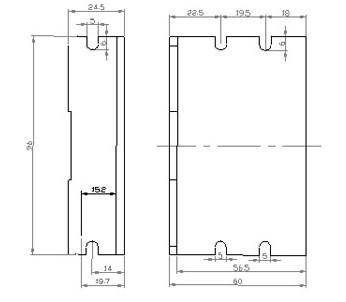
5. Meganyske spesifikaasje:
Om 20 mm romte om te hawwen, kin net neist oare ferwaarmingsapparaten pleatst wurde.Wat mear is, foarkomme stof, oaljemist, korrosyf gas, swiere fochtigens en hege trilling.(Ienheid = mm)
6. Oanpassing fan troubleshooting
1), de status op ljocht's yndikaasje
PWR: grien, normaal wurk ljocht.
ALM: read, flaterljocht, de motor mei fazekoartsluting, oerspannings- en ûnderspanningsbeskerming.
2) Troubles
| Alarm indicator | Redenen | Maatregels |
| LED út beurt | Ferkearde ferbining foar macht | Kontrolearje wiring fan macht |
| Low-voltages foar macht | Fergrutsje spanning fan macht | |
| Motor rint net, sûnder koppel te hâlden | Ferkearde ferbining fan stepper motor | Korrigearje syn wiring |
| RESET-sinjaal is effektyf as offline | Meitsje RESET net effektyf | |
| Motor rint net, mar behâldt holding koppel | Sûnder input puls sinjaal | Pas PMW & sinjaalnivo oan |
| Motor rint ferkearde rjochting | Ferkearde draadferbining | Feroarje ferbining foar ien fan 2 triedden |
| Ferkearde input rjochting sinjaal | Feroarje rjochting ynstelling | |
| Motor syn holding koppel is te lyts | Te lyts relatyf oan hjoeddeistige ynstelling | Korrekte rated hjoeddeistige ynstelling |
| Acceleration is te fluch | Ferminderje de fersnelling | |
| Motor stâlen | Útslute meganyske falen | |
| Bestjoerder komt net oerien mei de motor | Feroarje in geskikte bestjoerder |
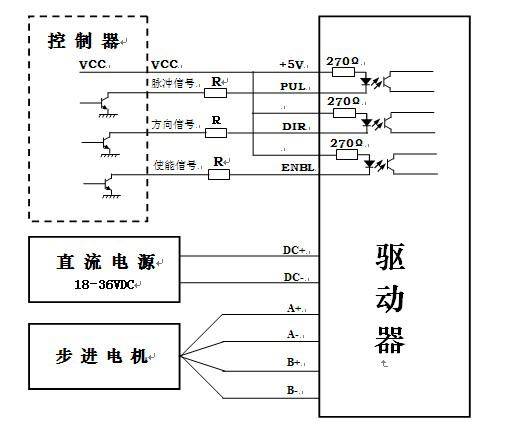
7. Driver wiring
In folslein stepper motor kontrôle systeem moat befetsje stepper driuwfearren, DC Netzteil en controller (puls boarne).It folgjende is in typysk systeem wiring diagram