Introducción:
DM420A es un tipo de controlador de motor paso a paso híbrido de dos fases, cuyo voltaje de accionamiento es de 12 VCC a 36 VCC.Está diseñado para usarse con motores paso a paso híbridos bifásicos de todo tipo con un diámetro exterior de 20 mm a 42 mm y una corriente de fase inferior a 2,0 A.Este circuito que adopta es similar al circuito de servocontrol que permite que el motor funcione suavemente casi sin ruido ni vibración.El par de torsión cuando el DM420A funciona a alta velocidad también es significativamente mayor que el del otro controlador de dos fases; además, la precisión de posicionamiento también es mayor.Es ampliamente utilizado en dispositivos de control numérico de tamaño mediano y grande, como máquinas curvadoras, máquinas CNC, máquinas de bordar por computadora, máquinas empacadoras, etc.
Características:
l Alto rendimiento, bajo precio
l Control de corriente promedio, unidad de corriente de salida sinusoidal bifásica
l Tensión de alimentación de 12 VCC a 36 VCC
l E/S de señal optoaislada
l Sobretensión, subtensión, sobrecorrección, protección contra cortocircuitos de fase
l Subdivisión de 8 canales y reducción automática de corriente inactiva
l Configuración de corriente de fase de salida de 8 canales
l Terminal de entrada de comandos sin conexión
l El par motor está relacionado con la velocidad, pero no con el paso/revolución.
l Alta velocidad de inicio
l Alto par de torsión a alta velocidad
Especificaciones eléctricas:
| Voltaje de entrada | 12-36 VCC |
| Corriente de entrada | < 2A |
| Corriente de salida | 0,44A-2,83A |
| Consumo | Consumo:40W; |
| Temperatura | Temperatura de trabajo -10 ~ 45 ℃ ; Temperatura de almacenamiento -40 ℃ ~ 70 ℃ |
| Humedad | Sin condensación, sin gotas de agua. |
| gas | Prohibición de gases combustibles y polvo conductor. |
| peso | 70G |
Asignaciones y descripción de pines:
1) Configuraciones de pines del conector
| Función de pasador | Detalles |
| PUL+,PUL- | Señal de pulso, PUL+ es el extremo positivo del pin de entrada de pulsos. PUL- es el extremo negativo del pin de entrada de pulsos. |
| DIR+,DIR- | Señal DIR: DIR+ es el extremo positivo del pin de entrada de dirección. DIR- es el extremo negativo del pin de entrada de dirección. |
| ENBL+ | Señal de habilitación: ENBL+ es el extremo positivo del pin de entrada de dirección.Esta señal se utiliza para habilitar/deshabilitar el controlador.Nivel alto para habilitar al conductor y nivel bajo para deshabilitarlo. |
| ENBL- | ENBL- es el extremo negativo del pin de entrada de dirección.Generalmente se deja desconectado (habilitado) |
2) Diagrama de cableado de pines:
Las señales de control de la PC pueden estar activas en niveles eléctricos altos y bajos.Cuando el nivel eléctrico alto está activo, todas las señales negativas de control se conectarán juntas a GND.Cuando el nivel eléctrico bajo está activo, todas las señales positivas de control se conectarán juntas al puerto público.Ahora dé dos ejemplos (colector abierto y PNP), verifíquelos:

Fig 1. Circuito del puerto de entrada (conexión positiva)
Salida de conector abierto de PC
Fig. 2 Circuito del puerto de entrada (conexión negativa)
Salida PCPNP
Nota: Cuando VCC=5V, R=0
Cuando VCC=12V, R=1K, >1/8W
Cuando VCC=24V, R=2K,>1/8W
R debe conectarse en la parte de la señal de control.
3.Elección de función (uso de pines DIP para lograr esta función)
1) La resolución de micropasos se establece mediante SW 5,6,7,8 del interruptor DIP como se muestra en la siguiente tabla:
| SW5 | ON | APAGADO | ON | APAGADO | ON | APAGADO | ON | APAGADO |
| SW6 | ON | ON | APAGADO | APAGADO | ON | ON | APAGADO | APAGADO |
| SW7 | ON | ON | ON | ON | APAGADO | APAGADO | APAGADO | APAGADO |
| Pulso/revoluciones | 200 | 400 | 800 | 1600 | 3200 | 6400 | 12800 | 25600 |
| Micro | 1 | 2 | 4 | 8 | 16 | 32 | 64 | 128 |
2) Ajuste de corriente de parada
Para ello se utiliza SW4.APAGADO significa que la corriente de parada se establece en la mitad de la corriente dinámica seleccionada y ENCENDIDO significa que la corriente de parada se establece en la misma que la corriente dinámica seleccionada.
3) Configuración de corriente de salida:
Los primeros tres bits (SW 1, 2, 3) del interruptor DIP se utilizan para configurar la corriente dinámica.Seleccione una configuración
Más cercano a la corriente requerida de su motor
| SW1 | SW2 | SW3 | CIMA | RMS |
| ON | ON | ON | 0,44 A | 0,31 A |
| APAGADO | ON | ON | 0,62 A | 0,44 A |
| ON | APAGADO | ON | 0,74 A | 0,52 A |
| APAGADO | APAGADO | ON | 0,86 A | 0,61 A |
| ON | ON | APAGADO | 1,46 A | 1,03A |
| APAGADO | ON | APAGADO | 1,69 A | 1,20 A |
| ON | APAGADO | APAGADO | 2.14A | 1,51 A |
| APAGADO | APAGADO | APAGADO | 2,83 A | 2,00 A |
4) Función de semiflujo:
La función de semiflujo es que no hay pulso de paso después de 200 ms, la corriente de salida del controlador se reduce automáticamente al 40% de la corriente de salida nominal, que se utiliza para evitar el calor del motor.
4. Pines de motor y potencia:
| Pines de motor y alimentación. | 1 | A+ | Cableado de motores | |
| 2 | A- | |||
| 3 | B+ | |||
| 4 | B- | |||
| 5,6 | CC+ CC- | Fuente de alimentación | Fuente de alimentación: DC12-36VDCLa corriente de entrada máxima no puede ser de hasta 2A |
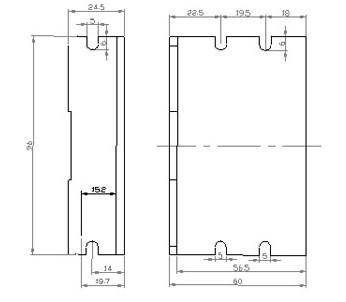
5. Especificaciones mecánicas:
Al tener 20 mm de espacio alrededor, no se puede colocar junto a otros dispositivos de calefacción.Además, evite el polvo, la neblina de aceite, los gases corrosivos, la humedad intensa y las vibraciones elevadas.(Unidad=mm)
6. Ajuste de solución de problemas.
1), el estado de la indicación de la luz.
PWR: luz verde, luz de trabajo normal.
ALM: rojo, luz de falla, motor con cortocircuito de fase, protección contra sobretensión y subtensión.
2) problemas
| Indicador de alarma | Razones | Medidas |
| LED apagado | Conexión incorrecta para la alimentación. | Verificar cableado de potencia |
| Bajos voltajes para energía. | Ampliar voltaje de potencia. | |
| El motor no gira sin mantener el par | Conexión incorrecta del motor paso a paso | Corregir su cableado |
| La señal RESET es efectiva cuando está fuera de línea | Hacer RESET ineficaz | |
| El motor no gira pero mantiene el par de retención. | Sin señal de pulso de entrada | Ajustar PMW y nivel de señal |
| El motor gira en dirección equivocada | Conexión de cables incorrecta | Cambie la conexión para cualquiera de los 2 cables |
| Señal de dirección de entrada incorrecta | Cambiar configuración de dirección | |
| El par de retención del motor es demasiado pequeño | Demasiado pequeño en relación con la configuración actual | Corrija la configuración de corriente nominal |
| La aceleración es demasiado rápida | Reducir la aceleración | |
| El motor se cala | Descartar falla mecánica | |
| El controlador no coincide con el motor. | Cambiar un controlador adecuado |
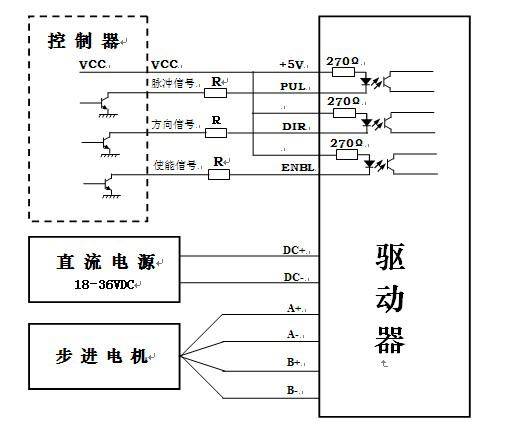
7. Cableado del controlador
Un sistema completo de control de motor paso a paso debe contener controladores paso a paso, fuente de alimentación de CC y controlador (fuente de impulsos).El siguiente es un diagrama de cableado típico del sistema.