Sissejuhatus:
DM420A on teatud tüüpi kahefaasiline hübriid-sammumootori draiver, mille ajami pinge on 12V kuni 36VDC.See on mõeldud kasutamiseks igat tüüpi 2-faasilise hübriidsammmootoriga, mille välisläbimõõt on 20–42 mm ja faasivool alla 2,0 A.See vooluahel, mida see kasutab, sarnaneb servojuhtimisahelaga, mis võimaldab mootoril töötada sujuvalt peaaegu ilma müra ja vibratsioonita.Kui DM420A töötab suurel kiirusel, on pöördemoment oluliselt suurem kui teisel kahefaasilisel draiveril, pealegi on suurem ka positsioneerimistäpsus.Seda kasutatakse laialdaselt keskmistes ja suurtes arvjuhtimisseadmetes, nagu kõverdusmasin, CNC-masin ja arvuti tikkimismasin, pakkimismasinad ja nii edasi.
Funktsioonid:
l Kõrge jõudlus, madal hind
l Keskmise voolu reguleerimine, 2-faasiline sinusoidne väljundvoolu ajam
l Toitepinge 12VDC kuni 36VDC
l Opto-isoleeritud signaali I/O
l Ülepinge, alapinge, ülekorrektne, faasi lühisekaitse
l 8 kanali alajaotus ja automaatne tühikäiguvoolu vähendamine
l 8 kanaliga väljundfaasi voolu seadistus
l Võrguühenduseta käsusisendi terminal
l Mootori pöördemoment on seotud kiirusega, kuid mitte sammu/pöördega
l Suur käivituskiirus
l Suur pöördemoment suurel kiirusel
Elektriline spetsifikatsioon:
| Sisendpinge | 12-36VDC |
| Sisendvool | < 2A |
| Väljundvool | 0,44A-2,83A |
| Tarbimine | Tarbimine:40W; |
| Temperatuur | Töötemperatuur -10 ℃ 45 ℃ ; Varu temperatuur -40 ℃ - 70 ℃ |
| Niiskus | Ei kondenseeru ega veepiisku |
| gaas | Põlevgaaside ja elektrit juhtiva tolmu keeld |
| kaal | 70G |
Pins ülesanded ja kirjeldus:
1) Pistiku kontaktide konfiguratsioonid
| Pin Funktsioon | Üksikasjad |
| PUL +, PUL- | Impulsssignaal, PUL+ on impulsi sisendviigu positiivne otsPUL- on impulsi sisendi viigu negatiivne ots |
| DIR+, DIR- | DIR-signaal: DIR+ on suuna sisendviigu positiivne ots pinDIR- on suuna sisendviigu negatiivne ots |
| ENBL+ | Signaali lubamine: ENBL+ on suuna sisendviigu positiivne ots.Seda signaali kasutatakse draiveri lubamiseks/keelamiseks.Kõrge tase juhi lubamiseks ja madal tase juhi keelamiseks. |
| ENBL- | ENBL- on suuna sisendviigu negatiivne ots.Tavaliselt jäetakse ühendamata (lubatud) |
2) Tihvtide ühendusskeem:
Arvuti juhtsignaalid võivad olla aktiivsed kõrgel ja madalal elektritasemel.Kui kõrge elektritase on aktiivne, ühendatakse kõik negatiivsed juhtsignaalid GND-ga.Kui madal elektritase on aktiivne, ühendatakse kõik positiivsed juhtsignaalid avaliku pordiga.Nüüd tooge kaks näidet (avatud koguja & PNP), kontrollige neid:

Joonis 1. Sisendpordi ahel (positiivne ühendus)
Arvuti avatud pistiku väljund
Joonis 2 Sisendpordi ahel (negatiivne ühendus)
PC PNP väljund
Märkus. Kui VCC = 5 V, R = 0
Kui VCC=12V, R=1K, >1/8W
Kui VCC=24V, R=2K,>1/8W
R peab ühendama juhtsignaali osaga.
3. Funktsiooni valik (DIP-tihvtide kasutamine selle funktsiooni saavutamiseks)
1) Mikroastmeline eraldusvõime määratakse DIP-lüliti SW 5,6,7,8 abil, nagu on näidatud järgmises tabelis:
| SW5 | ON | VÄLJAS | ON | VÄLJAS | ON | VÄLJAS | ON | VÄLJAS |
| SW6 | ON | ON | VÄLJAS | VÄLJAS | ON | ON | VÄLJAS | VÄLJAS |
| SW7 | ON | ON | ON | ON | VÄLJAS | VÄLJAS | VÄLJAS | VÄLJAS |
| Pulss/pöör | 200 | 400 | 800 | 1600 | 3200 | 6400 | 12800 | 25600 |
| Mikro | 1 | 2 | 4 | 8 | 16 | 32 | 64 | 128 |
2) Seiskumisvoolu seadistus
Selleks kasutatakse SW4.OFF tähendab, et seisuvool on seatud pooleks valitud dünaamilisest voolust ja ON tähendab, et seisak on seatud samale kui valitud dünaamiline vool.
3) Väljundvoolu seadistus:
DIP-lüliti kolme esimest bitti (SW 1, 2, 3) kasutatakse dünaamilise voolu seadistamiseks.Valige seade
Teie mootori nõutavale voolule lähim
| SW1 | SW2 | SW3 | PEAK | RMS |
| ON | ON | ON | 0,44 A | 0,31 A |
| VÄLJAS | ON | ON | 0,62 A | 0,44 A |
| ON | VÄLJAS | ON | 0,74 A | 0,52 A |
| VÄLJAS | VÄLJAS | ON | 0,86 A | 0,61 A |
| ON | ON | VÄLJAS | 1,46 A | 1,03 A |
| VÄLJAS | ON | VÄLJAS | 1,69 A | 1.20 A |
| ON | VÄLJAS | VÄLJAS | 2,14 A | 1,51 A |
| VÄLJAS | VÄLJAS | VÄLJAS | 2,83 A | 2.00 A |
4) Poolvoolu funktsioon:
Poolvoolu funktsioon seisneb selles, et pärast 200 ms-i pole astmelist impulssi, juhi väljundvool väheneb automaatselt 40% -ni nimiväljundvoolust, mida kasutatakse mootori kuumenemise vältimiseks.
4. Mootori ja võimsuse kontaktid:
| Mootori- ja toitetihvtid | 1 | A+ | Mootorite juhtmestik | |
| 2 | A- | |||
| 3 | B+ | |||
| 4 | B- | |||
| 5,6 | DC+ DC- | Toiteallikas | Toide: DC12-36VDC Maksimaalne sisendvool ei tohi olla kuni 2A |
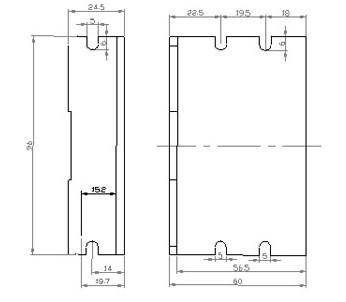
5. Mehaaniline spetsifikatsioon:
Et selle ümber oleks 20 mm ruumi, ei saa seda paigutada teiste kütteseadmete kõrvale.Veelgi enam, vältige tolmu, õliudu, söövitavat gaasi, suurt niiskust ja kõrget vibratsiooni.(ühik = mm)
6. Veaotsingu reguleerimine
1), tule näidiku olek
PWR: roheline, tavaline töötuli.
ALM: punane, rikke tuli, mootor faasilühise, üle- ja alapingekaitsega.
2) Probleemid
| Häire indikaator | Põhjused | Meetmed |
| LED välja lülitamine | Vale toiteühendus | Kontrollige toitejuhtmeid |
| Madalpinged toiteallikaks | Suurendage toitepinget | |
| Mootor ei tööta, ilma pöördemomenti hoidmata | Sammmootori vale ühendus | Parandage selle juhtmestik |
| RESET-signaal toimib võrguühenduseta | Muuda RESET ebatõhusaks | |
| Mootor ei tööta, kuid hoiab pöördemomenti | Ilma sisendimpulsssignaalita | Reguleerige PMW ja signaali taset |
| Mootor töötab vales suunas | Vale juhtmeühendus | Muutke ühendus ükskõik millise kahe juhtme jaoks |
| Vale sisendsuuna signaal | Muutke suunaseadet | |
| Mootori pöördemoment on liiga väike | Praeguse seadistuse suhtes liiga väike | Õige nimivoolu seadistus |
| Kiirendus on liiga kiire | Vähendage kiirendust | |
| Mootor seiskub | Välistada mehaaniline rike | |
| Juht ei sobi mootoriga | Vahetage sobiv draiver |
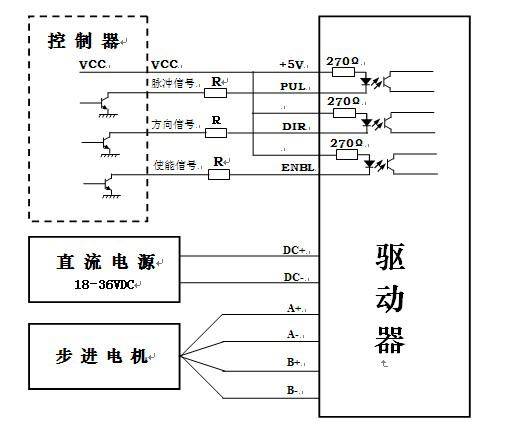
7. Draiveri juhtmestik
Täielik samm-mootori juhtimissüsteem peaks sisaldama samm-ajami, alalisvoolu toiteallikat ja kontrollerit (impulsiallikat).Järgmine on tüüpiline süsteemi juhtmestiku skeem