Sarrera:
DM420A urratseko motor hibrido bi faseko gidari mota bat da, eta horren disko-tentsioa 12VDC-tik 36VDC bitartekoa da.20 mm-tik 42 mm-ko kanpo-diametroarekin eta 2.0A faseko korronte baino gutxiagoko mota guztietako 2 faseko motor hibridoarekin erabiltzeko diseinatuta dago.Hartzen duen zirkuitu hau serbo-kontrolaren zirkuituaren antzekoa da eta horrek motorra leunki ibiltzea ahalbidetzen du ia zarata eta bibraziorik gabe.Hording momentua DM420A abiadura handian exekutatzen denean beste bi faseko gidaria baino nabarmen handiagoa da, gainera, posizionamenduaren zehaztasuna ere handiagoa da.Oso erabilia da tamaina ertaineko eta handietako zenbakizko kontroleko gailuetan, hala nola kurbatzeko makina, CNC makina eta ordenagailua brodatzeko makina, ontziratzeko makinak eta abar.
Ezaugarriak:
l Errendimendu handia, prezio baxua
l Batez besteko korronte kontrola, irteerako korronte sinusoidala bi faseko unitate
l Hornitzeko tentsioa 12VDC-tik 36VDC-ra
l Seinale opto-isolatua I/O
l Gaintentsioa, tentsio azpikoa, gainzuzena, fase zirkuitu laburren babesa
l 8 kanalen zatiketa eta inaktibo-korronte murrizketa automatikoa
l 8 kanaleko irteerako fasearen korronte ezarpena
l Lineaz kanpoko komandoak sartzeko terminala
l Motor-momentua abiadurarekin erlazionatuta dago, baina ez pauso/iraultzarekin lotuta
l Abiadura handia
l Hording momentu handia abiadura handian
Zehaztapen elektrikoa:
| Sarrerako tentsioa | 12-36VDC |
| Sarrerako korrontea | < 2A |
| Irteerako korrontea | 0,44A- 2,83A |
| Kontsumoa | Kontsumoa:40W; |
| Tenperatura | Lan-tenperatura -10 ~ 45 ℃ ; Baltze-tenperatura -40 ℃ ~ 70 ℃ |
| Hezetasuna | Ez kondentsazioa, ez ur tantarik |
| gasa | Gas erregaiak eta hauts eroaleak debekatzea |
| pisua | 70G |
Pinen esleipenak eta deskribapena:
1) Konektore-pinen konfigurazioak
| Pin Funtzioa | Xehetasunak |
| PUL +,PUL- | Pultsu seinalea, PUL+ pultsuen sarrerako pinaren amaiera positiboa da.PUL- pultsuaren sarrerako pinaren amaiera negatiboa da |
| DIR+,DIR- | DIR seinalea: DIR+ norabideko sarrerako pinaren amaiera positiboa da.DIR- norabideko sarrerako pinaren amaiera negatiboa da |
| ENBL+ | Gaitu seinalea: ENBL+ norabideko sarrerako pinaren amaiera positiboa da.Seinale hau kontrolatzailea gaitzeko/desgaitzeko erabiltzen da.Gidaria gaitzeko maila altua eta gidaria desgaitzeko maila baxua. |
| ENBL- | ENBL- norabideko sarrerako pinaren amaiera negatiboa da.Normalean konektatu gabe geratzen da (gaituta) |
2) Pinen kableatuaren diagrama:
Ordenagailuaren kontrol-seinaleak maila elektriko altuan eta baxuan aktibo egon daitezke.Maila elektriko altua aktibo dagoenean, kontrol-seinale negatibo guztiak elkarrekin konektatuko dira GNDra.Maila elektriko baxua aktibo dagoenean, kontrol-seinale positibo guztiak batera konektatuko dira portu publikora.Orain eman bi adibide (biltzaile irekia eta PNP), mesedez begiratu:

1. irudia. Sarrerako atakaren zirkuitua (konexio positiboa)
PC konektore irekiko irteera
2. Irudia Sarrerako ataka-zirkuitua (Konexio negatiboa)
PC PNP irteera
Oharra: VCC=5V denean, R=0
VCC=12V, R=1K, >1/8W
VCC=24V denean, R=2K,>1/8W
R kontrol-seinalearen zatian konektatu behar da.
3.Funtzio aukera (DIP pinak erabiliz funtzio hau lortzeko)
1) Mikro urratseko bereizmena DIP etengailuaren SW 5,6,7,8-k ezartzen du hurrengo taulan erakusten den moduan:
| SW5 | ON | OFF | ON | OFF | ON | OFF | ON | OFF |
| SW6 | ON | ON | OFF | OFF | ON | ON | OFF | OFF |
| SW7 | ON | ON | ON | ON | OFF | OFF | OFF | OFF |
| Pultsu/bira | 200 | 400 | 800 | 1600 | 3200 | 6400 | 12800 | 25600 |
| Mikro | 1 | 2 | 4 | 8 | 16 | 32 | 64 | 128 |
2) Geldialdiko korronte ezarpena
SW4 erabiltzen da horretarako.OFF esan nahi du geldialdi-korrontea hautatutako korronte dinamikoaren erdia dela eta ON esan nahi du geldialdia hautatutako korronte dinamikoaren berdina dela.
3) Irteerako korronte ezarpena:
DIP etengailuaren lehen hiru bitak (SW 1, 2, 3) korronte dinamikoa ezartzeko erabiltzen dira.Hautatu ezarpen bat
Zure motorraren behar den korrontetik gertuen
| SW1 | SW2 | SW3 | GAILURRA | RMS |
| ON | ON | ON | 0,44 A | 0,31 A |
| OFF | ON | ON | 0,62 A | 0,44 A |
| ON | OFF | ON | 0,74 A | 0,52 A |
| OFF | OFF | ON | 0,86 A | 0,61 A |
| ON | ON | OFF | 1,46 A | 1.03 A |
| OFF | ON | OFF | 1,69 A | 1,20 A |
| ON | OFF | OFF | 2.14 A | 1,51 A |
| OFF | OFF | OFF | 2,83 A | 2.00 A |
4) Erdi-fluxuaren funtzioa:
Erdi-fluxuaren funtzioa 200 ms-ren ondoren ez dagoela pultsurik urratsa da, gidariaren irteerako korrontea automatikoki irteerako korronte nominalaren % 40ra murrizten da, motorraren beroa saihesteko erabiltzen dena.
4. Motor eta potentziaren pinak:
| Motor eta potentzia pinak | 1 | A+ | Motoren kableatzea | |
| 2 | A- | |||
| 3 | B+ | |||
| 4 | B- | |||
| 5,6 | DC+ DC- | Energia hornidura | Elikadura hornidura: DC12-36VDC Sarrerako korronte gailurra ezin da 2A izan |
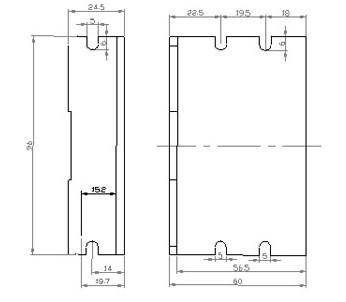
5. Zehaztapen mekanikoak:
Inguruan 20 mm-ko espazioa izateko, ezin da jarri beste berogailu gailu batzuen ondoan.Gainera, saihestu hautsa, olio-lainoa, gas korrosiboa, hezetasun handia eta bibrazio handia.(Unitatea=mm)
6. Arazoak konpontzeko doikuntza
1), argiaren adierazlearen egoera
PWR: berdea, lan-argi normala.
ALM: gorria, hutsegite argia, fase-zirkuitu laburrean, gaintentsio eta azpitentsio babesarekin motorra.
2) Arazoak
| Alarma adierazlea | Arrazoiak | Neurriak |
| LED itzali piztu | Elektrizitaterako konexio okerra | Egiaztatu potentzia-kablea |
| Potentziarako tentsio baxuak | Potentzia-tentsioa handitu | |
| Motorrak ez du martxan, momentua eutsi gabe | Stepper-motorraren konexio okerra | Zuzendu bere kableatzea |
| RESET seinalea eraginkorra da konexiorik gabe dagoenean | Egin RESET eraginkorra | |
| Motorrak ez du funtzionatzen, baina euste-parea mantentzen du | Sarrerako pultsu seinalerik gabe | Doitu PMW eta seinale maila |
| Motorrak norabide okerra darama | Kableen konexio okerra | Aldatu konexioa 2 harietako edozeinentzat |
| Sarrerako norabide seinale okerra | Aldatu norabide ezarpena | |
| Motorren euste-momentua txikiegia da | Txikiegia egungo ezarpenarekiko | Korronte nominalaren ezarpen zuzena |
| Azelerazioa azkarregia da | Azelerazioa murriztu | |
| Motor postuak | Baztertu hutsegite mekanikoa | |
| Gidaria ez dator bat motorrekin | Aldatu gidari egoki bat |
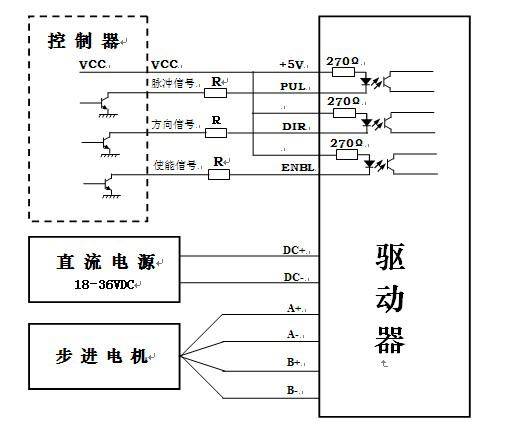
7. Gidariaren kableatzea
Stepper motorren kontrol-sistema oso batek urratseko unitateak, DC elikadura hornidura eta kontrolagailua (pultsu iturria) izan behar ditu.Jarraian sistemaren kableatuaren diagrama tipiko bat da