소개:
DM420A는 2상 하이브리드 스테핑 모터 드라이버의 일종으로, 구동 전압은 12VDC ~ 36VDC입니다.이 제품은 외경이 20mm~42mm이고 위상 전류가 2.0A 미만인 모든 종류의 2상 하이브리드 스테퍼 모터와 함께 사용하도록 설계되었습니다.채택된 이 회로는 모터가 소음이나 진동 없이 원활하게 작동할 수 있도록 하는 서보 제어 회로와 유사합니다.DM420A가 고속으로 작동할 때의 호딩 토크도 다른 2단계 드라이버보다 훨씬 높으며 위치 정확도도 더 높습니다.커브 기계, CNC 기계, 컴퓨터 자수 기계, 포장 기계 등과 같은 중대형 수치 제어 장치에 널리 사용됩니다.
특징:
l 고성능, 저렴한 가격
l 평균 전류 제어, 2상 정현파 출력 전류 구동
엘 12VDC ~ 36VDC의 공급 전압
l 광절연 신호 I/O
l 과전압, 저전압, 과수정, 위상 단락 보호
l 8개 채널 세분화 및 자동 유휴 전류 감소
l 8채널 출력 위상 전류 설정
l 오프라인 명령 입력 단자
l 모터 토크는 속도와 관련이 있지만 단계/회전과는 관련이 없습니다.
l 높은 시작 속도
l 고속에서 높은 호딩 토크
전기 사양:
| 입력 전압 | 12-36VDC |
| 입력 전류 | < 2A |
| 출력 전류 | 0.44A-2.83A |
| 소비 | 소비:40W; |
| 온도 | 작동 온도 -10~45℃; 스타킹 온도 -40℃~70℃ |
| 습기 | 결로 현상이 없고 물방울이 생기지 않습니다. |
| 가스 | 가연성 가스 및 전도성 먼지의 금지 |
| 무게 | 70G |
핀 할당 및 설명:
1) 커넥터 핀 구성
| 핀 기능 | 세부 |
| PUL +, PUL- | 펄스 신호, PUL+는 펄스 입력 핀의 양극 끝입니다. PUL-는 펄스 입력 핀의 음극 끝입니다. |
| 디렉터리+,디렉터- | DIR 신호: DIR+는 방향 입력 핀의 양극 끝입니다.DIR-는 방향 입력 핀의 음극 끝입니다. |
| ENBL+ | 활성화 신호: ENBL+는 방향 입력 핀의 양극 끝입니다.이 신호는 드라이버를 활성화/비활성화하는 데 사용됩니다.드라이버를 활성화하는 경우에는 높은 수준이고 드라이버를 비활성화하는 경우에는 낮은 수준입니다. |
| ENBL- | ENBL-은 방향 입력 핀의 음수 끝입니다.일반적으로 연결되지 않은 상태로 유지(활성화) |
2) 핀 배선도:
PC의 제어 신호는 높고 낮은 전기 레벨에서 활성화될 수 있습니다.높은 전기 레벨이 활성화되면 모든 제어 음극 신호가 GND에 함께 연결됩니다.낮은 전기 레벨이 활성화되면 모든 제어 양극 신호가 공용 포트에 함께 연결됩니다.이제 두 가지 예(오픈 컬렉터 및 PNP)를 제시하고 확인하십시오.

그림 1. 입력 포트 회로(양극 연결)
PC 오픈 커넥터 출력
그림 2 입력 포트 회로( 음극 연결)
PC PNP 출력
참고: VCC=5V일 때 R=0
VCC=12V, R=1K, >1/8W일 때
VCC=24V, R=2K,>1/8W일 때
R은 제어신호 부분에 연결해야 합니다.
3. 기능 선택(이 기능을 달성하기 위해 DIP 핀 사용)
1) 마이크로 스텝 분해능은 다음 표와 같이 DIP 스위치의 SW 5,6,7,8에 의해 설정됩니다.
| SW5 | ON | 끄다 | ON | 끄다 | ON | 끄다 | ON | 끄다 |
| SW6 | ON | ON | 끄다 | 끄다 | ON | ON | 끄다 | 끄다 |
| SW7 | ON | ON | ON | ON | 끄다 | 끄다 | 끄다 | 끄다 |
| 펄스/회전 | 200 | 400 | 800 | 1600 | 3200 | 6400 | 12800 | 25600 |
| 마이크로 | 1 | 2 | 4 | 8 | 16 | 32 | 64 | 128 |
2) 정지전류 설정
SW4는 이러한 목적으로 사용됩니다.OFF는 정지 전류가 선택된 동적 전류의 절반으로 설정됨을 의미하고, ON은 정지가 선택된 동적 전류와 동일하게 설정됨을 의미합니다.
3) 출력 전류 설정:
DIP 스위치의 처음 3개 비트(SW 1, 2, 3)는 동적 전류를 설정하는 데 사용됩니다.설정을 선택하세요
모터에 필요한 전류에 가장 가깝습니다.
| SW1 | SW2 | SW3 | 정점 | RMS |
| ON | ON | ON | 0.44A | 0.31A |
| 끄다 | ON | ON | 0.62A | 0.44A |
| ON | 끄다 | ON | 0.74A | 0.52A |
| 끄다 | 끄다 | ON | 0.86A | 0.61A |
| ON | ON | 끄다 | 1.46A | 1.03A |
| 끄다 | ON | 끄다 | 1.69A | 1.20A |
| ON | 끄다 | 끄다 | 2.14A | 1.51A |
| 끄다 | 끄다 | 끄다 | 2.83A | 2.00A |
4) 반유동 기능:
반유량 기능은 200ms 이후에는 스텝 펄스가 없으며 드라이버 출력 전류가 자동으로 정격 출력 전류의 40%로 감소하여 모터 열을 방지하는 것입니다.
4. 모터 및 전원 핀:
| 모터 및 전원 핀 | 1 | A+ | 모터 배선 | |
| 2 | A- | |||
| 3 | B+ | |||
| 4 | B- | |||
| 5,6 | DC+ DC- | 전원공급장치 | 전원 공급 장치: DC12-36VDC피크 입력 전류는 최대 2A일 수 없습니다. |
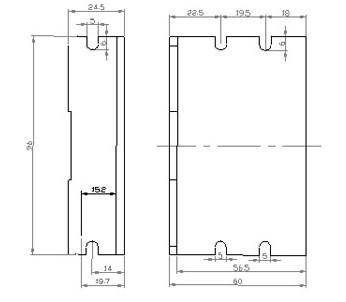
5. 기계 사양:
주위에 20mm의 공간을 확보하기 위해 다른 난방 장치 옆에 배치할 수 없습니다.또한 먼지, 오일 미스트, 부식성 가스, 높은 습도 및 높은 진동을 피하십시오.(단위=mm)
6. 문제 해결 조정
1) , 표시등의 상태 표시
PWR: 녹색, 일반 작업등.
ALM: 빨간색, 오류 표시 등, 위상 단락, 과전압 및 저전압 보호 기능이 있는 모터.
2) 고민
| 경보 표시기 | 원인 | 측정 |
| LED 꺼짐 켜짐 | 전원 연결이 잘못됨 | 전원 배선을 확인하세요. |
| 전력용 저전압 | 힘의 전압을 확대하십시오 | |
| 토크를 유지하지 않고 모터가 작동하지 않습니다. | 스테퍼 모터의 잘못된 연결 | 배선을 수정하세요 |
| RESET 신호는 오프라인일 때 유효합니다. | RESET을 무효화 | |
| 모터는 작동하지 않지만 유지 토크는 유지됩니다. | 입력 펄스 신호 없음 | PMW 및 신호 레벨 조정 |
| 모터가 잘못된 방향으로 작동함 | 잘못된 전선 연결 | 2선 중 하나에 대한 연결 변경 |
| 잘못된 입력 방향 신호 | 방향 설정 변경 | |
| 모터의 유지 토크가 너무 작습니다. | 현재 설정에 비해 너무 작습니다. | 올바른 정격 전류 설정 |
| 가속이 너무 빠르다 | 가속도를 줄이세요 | |
| 모터 실속 | 기계적 결함 배제 | |
| 드라이버가 모터와 일치하지 않습니다. | 적합한 드라이버를 변경하세요 |
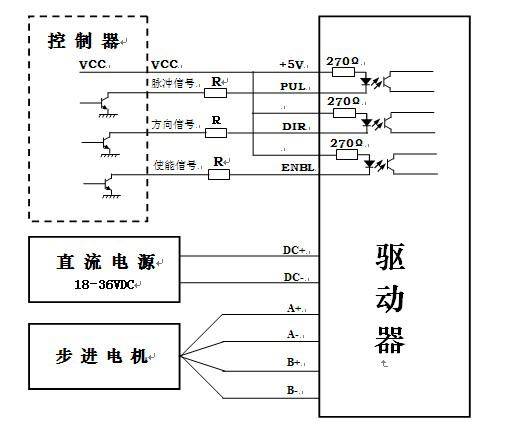
7. 드라이버 배선
완전한 스테퍼 모터 제어 시스템에는 스테퍼 드라이브, DC 전원 공급 장치 및 컨트롤러(펄스 소스)가 포함되어야 합니다.다음은 일반적인 시스템 배선 다이어그램입니다.