Introductio:
DM420A genus est duorum phases hybridorum rectoris motoris gradiendi, cuius voltatio coegi est ab 12VDC ad 36VDC.Destinatur ad usum cum 2-phase hybrid stepper omnium generum motoriis cum 20mm ad 42mm extra diametrum et minus quam 2.0A phase currente.Circuitus hic, quem adoptat, est similis circuitioni servo regiminis, qui dat motorem aequaliter fere sine strepitu et tremore.Hording torques cum DM420A sub alta celeritate currunt, est etiam signanter altior quam ceteri duo-phase agitator, quod magis, positio accuratio altior est.In media et magna magnitudine machinis numeralibus moderandis late adhibetur ut machinae curvae, machinae CNC, machinae acupicturae, machinae stipationes et cetera.
Features:
l High perficientur, humilis pretium
l Average current control, 2-phase sinusoidalis output current coegi
l Supple intentione ab 12VDC ad 36VDC
l Opto-tiosum signum I / O *
l Overvoltage, sub intentione, overcorrect, Phase brevis ambitus tutela
l 8 canales subdivisiones et reductiones latae vanos-currentes
l 8 canales output tempus current occasum
l Offline imperium initus terminalis
l Motor torques velociter refertur, sed non cum passu/revolutione refertur
l High satus celeritate
l High hording Aureus in altum celeritate
Specificatio electrica:
| Input voltage | 12-36VDC |
| Input current | 2A |
| Output current | 0.44A- 2.83A |
| Consummatio | Consummatio40W; |
| Temperature | Operatio Temperature -10~45℃; Stocking temperatus -40℃~70℃ |
| Umor | Non condensatio, non stillæ |
| gas | Prohibitio vaporum combustibilium et pulvis conductivorum |
| pondus | 70G |
clavi, provinciarum descriptio;
I) pins Connector configurationes
| Pin Function | Singula |
| PUL- | Signum pulsum , PUL + est finis positivus pulsuum initus pinPUL- est finis negativus pulsus initus pin |
| DIR+,DIR- | DIR signum: DIR + est finis positivus directionis initus pinDIR- finis negativus directionis initus pin |
| ENBL+ | Da signum: ENBL+ est finis positivus directionis initus in acu.Hoc signum adhibetur ad enabling / inactivare exactoris.Alto gradu ad efficiendum aurigam et humilem pro inactivare aurigam. |
| ENBL- | ENBL- finis negativus directionis input pin.Plerumque reliquit seiuncta (enabled) |
2) Pins wiring diagramma:
PC imperium significationibus electricae in alto et infimo activum esse potest.Cum summus gradus electricae est activus, omnes potestates negativas cum GND coniungentur.Cum gradus electrici humilis activus est, omnia signa positiva potestate ad portum publicum coniungentur.Nunc duo exempla praebe (Aperi collector &PNP), ea quaeso coercere;

Fig 1. Input portum circuit (connexionem affirmativam)
PC apertum iungo output
P. II Portus input circuitu (nexionem Negtive)
PC PNP output
Nota: Quando VCC=5V, R=0
Cum VCC=12V, R=1K, 1/8W
Quando VCC=24V, R=2K,>1/8W
R signum in parte imperium coniungere debet .
3.Function electionis (usurae tingunt paxillos ad hoc munus assequendum)
1) Micro gradatim resolutum ab SW 5,6,7,8 constituitur ex switch in MERULA ut in sequenti tabula ostenditur:
| SW5 | ON | OFF | ON | OFF | ON | OFF | ON | OFF |
| SW6 | ON | ON | OFF | OFF | ON | ON | OFF | OFF |
| SW7 | ON | ON | ON | ON | OFF | OFF | OFF | OFF |
| Pulsus/rev | 200 | 400 | 800 | 1600 | 3200 | 6400 | 12800 | 25600 |
| Micro | 1 | 2 | 4 | 8 | 16 | 32 | 64 | 128 |
II) Standstill current occasum
SW4 ad hanc rem adhibetur.DOLOR SIGNIFICATIO QUOD SIET QUOD SIET SIT POSITA DIMIDIA LECTAE dynamicae currentis et DE SIGNIFICATIONIS GRAPHIO SIT IDEM IDEM IN SELECTA dynamica current.
III) output current occasum:
Primae tres particulae (SW 1, 2, 3) de transitu switch ut dynamicam venam instituunt.Eligere occasum
Proxima ad current requiritur scriptor motricium tuum
| SW1 | SW2 | SW3 | POCUM | RMS |
| ON | ON | ON | 0.44 A | 0.31 A |
| OFF | ON | ON | 0.62 A | 0.44 A |
| ON | OFF | ON | 0.74 A | 0.52 A |
| OFF | OFF | ON | 0.86 A | 0.61 A |
| ON | ON | OFF | 1.46 A | 1.03 A |
| OFF | ON | OFF | 1.69 A | 1.20 A |
| ON | OFF | OFF | 2.14 A | 1.51 A |
| OFF | OFF | OFF | 2.83 A | 2.00 A |
4) Semi-fluxus munus;
Munus semi-fluxus est quod gradus pulsus post 200 ms non est, agitator output current automatice ad 40% output venae aestimatae reductus est, quod ad prohibendos calores motorios adhibetur.
4. Clavi motoris & virtutis;
| Motor ac potentia paxillos | 1 | A+ | Motors wiring | |
| 2 | A- | |||
| 3 | B+ | |||
| 4 | B- | |||
| 5,6 | DC+ DC- | Potentia copia | Potentia copia DC12-36VDCThe apicem initus current non potest esse usque ad 2A |
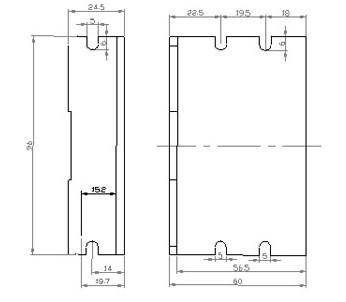
5. Mechanica Specification:
Circiter 20mm spatii habere, iuxta alias calefactiones machinis collocari non potest.Quid est magis, vitare pulverem, caliginem olei, gas mordax, humiditatem gravem et altam tremorem.(Unit=mm)
6. De revolutionibus adaequationem
1), status in luce indicium
PWR: viridis, normalis opus leve.
ALM: rubra, lux defectus, motor cum brevi spatio phase, overvoltage et sub intentione tutelae.
II) Angustiae
| Terror indicator | Rationes | mensurae |
| DUXERIT rursus | Nefas nexum pro potestate | Reprehendo de potestate wiring |
| Low-voltages pro potentia | Dilata intentione virtutis | |
| Motor non currere, sine tenens torque | Nefas nexu stepper motricium | Wiring corrigere suum |
| RESET signum est effective cum offline | Fac RESET inefficax | |
| Motor non currit, sed tenens torquetur | Sine signo pulsus initus | Adjust PMW & signo gradu |
| Motor decurrit iniuriam directionis | Nefas filis nexum | Mutare nexum pro aliquo II iora |
| Nefas initus directionis signum | Mutationem directionis occasum | |
| Motricium tenens Aureus angustus est | Angustus ad current occasum | Recta current occasum rated |
| Acceleratio est ieiunium | Redigendum accelerationem | |
| Motor stabula | Excluditur mechanica defectum | |
| Exactoris non congruit cum motricium | Mutare idoneam exactoris |
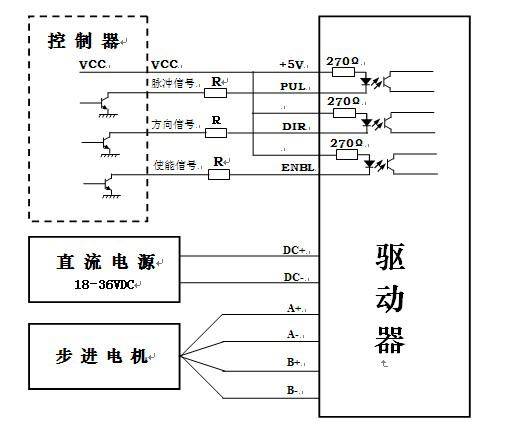
7. Coegi wiring
Ratio motoris plena stepper imperium debet continere stepper agit, DC copia potentiae et moderatoris (pulsoris principium).Hoc est typicam systema wiring diagram