Uvod:
DM420A je vrsta dvofaznega hibridnega gonilnika koračnega motorja, katerega pogonska napetost je od 12 VDC do 36 VDC.Zasnovan je za uporabo z 2-faznimi hibridnimi koračnimi motorji vseh vrst z zunanjim premerom od 20 mm do 42 mm in faznim tokom manj kot 2,0 A.To vezje, ki ga sprejme, je podobno vezju servo krmiljenja, ki omogoča gladko delovanje motorja skoraj brez hrupa in vibracij.Navor vrtenja, ko DM420A deluje pri visoki hitrosti, je prav tako bistveno višji kot pri drugem dvofaznem gonilniku, še več, višja je tudi natančnost pozicioniranja.Široko se uporablja v napravah za numerično krmiljenje srednje in velike velikosti, kot so stroji za krivljenje, CNC stroji in računalniški vezilni stroji, pakirni stroji itd.
Lastnosti:
l Visoka zmogljivost, nizka cena
l Nadzor povprečnega toka, 2-fazni sinusni izhodni tokovni pogon
l Napajalna napetost od 12VDC do 36VDC
l Opto-izoliran signal I/O
l Prenapetostna, podnapetostna, nadpravilna, fazna zaščita kratkega stika
l 8 razdelitev kanalov in samodejno zmanjšanje toka v prostem teku
l 8 kanalna nastavitev izhodnega faznega toka
l Terminal za vnos ukazov brez povezave
l Navor motorja je povezan s hitrostjo, ni pa povezan s korakom/vrtljajem
l Visoka začetna hitrost
l Visok vrtilni moment pri visoki hitrosti
Električna specifikacija:
| Vhodna napetost | 12-36VDC |
| Vhodni tok | < 2A |
| Izhodni tok | 0,44 A- 2,83 A |
| Poraba | Poraba:40W; |
| Temperatura | Delovna temperatura -10~45℃;temperatura skladiščenja -40℃~70℃ |
| Vlažnost | Brez kondenzacije, brez vodnih kapljic |
| plin | Prepoved gorljivih plinov in prevodnega prahu |
| utež | 70G |
Dodelitve zatičev in opis:
1) Konfiguracije konektorjev
| Pin funkcija | Podrobnosti |
| PUL +,PUL- | Impulzni signal, PUL+ je pozitivni konec impulznega vhodnega pinaPUL- je negativni konec impulznega vhodnega pina |
| DIR+,DIR- | DIR signal: DIR+ je pozitivni konec smernega vhodnega pina DIR- je negativni konec smernega vhodnega pina |
| ENBL+ | Omogoči signal: ENBL+ je pozitivni konec vhodnega zatiča smeri.Ta signal se uporablja za omogočanje/onemogočanje gonilnika.Visoka raven za omogočanje gonilnika in nizka raven za onemogočanje gonilnika. |
| ENBL- | ENBL- je negativni konec smernega vhodnega zatiča.Običajno ostane nepovezan (omogočen) |
2) Diagram ožičenja nožic:
Krmilni signali osebnega računalnika so lahko aktivni pri visoki in nizki električni ravni.Ko je aktiven visok električni nivo, bodo vsi krmilni negativni signali povezani skupaj z GND.Ko je aktiven nizek električni nivo, bodo vsi kontrolni pozitivni signali povezani skupaj z javnimi vrati.Sedaj navedite dva primera (Open collector &PNP), preverite ju:

Slika 1. Vezje vhodnih vrat (pozitivna povezava)
Izhod odprtega priključka PC
Slika 2 Vezje vhodnih vrat (negativna povezava)
PC PNP izhod
Opomba: Ko je VCC=5V, je R=0
Ko je VCC=12V, R=1K, >1/8W
Ko je VCC=24V, R=2K,>1/8W
R mora biti priključen v delu krmilnega signala.
3. Izbira funkcije (uporaba zatičev DIP za doseganje te funkcije)
1) Ločljivost mikro korakov je nastavljena s SW 5,6,7,8 stikala DIP, kot je prikazano v naslednji tabeli:
| SW5 | ON | IZKLOP | ON | IZKLOP | ON | IZKLOP | ON | IZKLOP |
| SW6 | ON | ON | IZKLOP | IZKLOP | ON | ON | IZKLOP | IZKLOP |
| SW7 | ON | ON | ON | ON | IZKLOP | IZKLOP | IZKLOP | IZKLOP |
| Pulz/vrt | 200 | 400 | 800 | 1600 | 3200 | 6400 | 12800 | 25600 |
| Mikro | 1 | 2 | 4 | 8 | 16 | 32 | 64 | 128 |
2) Nastavitev toka mirovanja
V ta namen se uporablja SW4.OFF pomeni, da je tok mirovanja nastavljen na polovico izbranega dinamičnega toka in ON pomeni, da je mirovanje nastavljeno enako kot izbrani dinamični tok.
3) Nastavitev izhodnega toka:
Prvi trije biti (SW 1, 2, 3) DIP stikala se uporabljajo za nastavitev dinamičnega toka.Izberite nastavitev
Najbližje zahtevanemu toku vašega motorja
| SW1 | SW2 | SW3 | VRHUNEC | RMS |
| ON | ON | ON | 0,44 A | 0,31 A |
| IZKLOP | ON | ON | 0,62 A | 0,44 A |
| ON | IZKLOP | ON | 0,74 A | 0,52 A |
| IZKLOP | IZKLOP | ON | 0,86 A | 0,61 A |
| ON | ON | IZKLOP | 1,46 A | 1,03 A |
| IZKLOP | ON | IZKLOP | 1,69 A | 1,20 A |
| ON | IZKLOP | IZKLOP | 2.14 A | 1,51 A |
| IZKLOP | IZKLOP | IZKLOP | 2,83 A | 2,00 A |
4) Funkcija poltoka:
Funkcija polpretoka je, da po 200 ms ni koračnega impulza, izhodni tok gonilnika se samodejno zmanjša na 40 % nazivnega izhodnega toka, kar se uporablja za preprečevanje pregrevanja motorja.
4. Zatiči motorja in moči:
| Motor in napajalni zatiči | 1 | A+ | Ožičenje motorjev | |
| 2 | A- | |||
| 3 | B+ | |||
| 4 | B- | |||
| 5,6 | DC+ DC- | Napajanje | Napajanje: DC12-36VDC Največji vhodni tok ne sme biti do 2A |
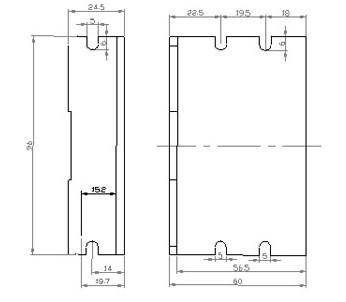
5. Mehanske specifikacije:
Da bi imeli okoli 20 mm prostora, ga ni mogoče postaviti poleg drugih grelnih naprav.Še več, izogibajte se prahu, oljni meglici, jedkemu plinu, močni vlagi in močnim vibracijam.(Enota=mm)
6. Prilagoditev odpravljanja težav
1), indikator statusa lučke
PWR: zelena, normalna delovna lučka.
ALM: rdeča, lučka za napako, motor s faznim kratkim stikom, prenapetostno in podnapetostno zaščito.
2) Težave
| Indikator alarma | Razlogi | Ukrepi |
| LED izklop | Napačna povezava za napajanje | Preverite ožičenje električne energije |
| Nizke napetosti za napajanje | Povečajte napetost | |
| Motor ne teče brez zadrževanja navora | Napačna povezava koračnega motorja | Popravite ožičenje |
| Signal RESET je učinkovit, ko ni povezave | Naj RESET postane neučinkovit | |
| Motor ne teče, vendar ohranja zadrževalni moment | Brez vhodnega impulznega signala | Prilagodite PMW in nivo signala |
| Motor teče v napačno smer | Napačna povezava žic | Spremenite povezavo za katero koli od dveh žic |
| Napačen vhodni smerni signal | Spremenite nastavitev smeri | |
| Zadrževalni moment motorja je premajhen | Premajhen glede na trenutno nastavitev | Pravilna nastavitev nazivnega toka |
| Pospeševanje je prehitro | Zmanjšajte pospešek | |
| Motor zastoji | Izključite mehanske okvare | |
| Gonilnik se ne ujema z motorjem | Zamenjajte ustrezen gonilnik |
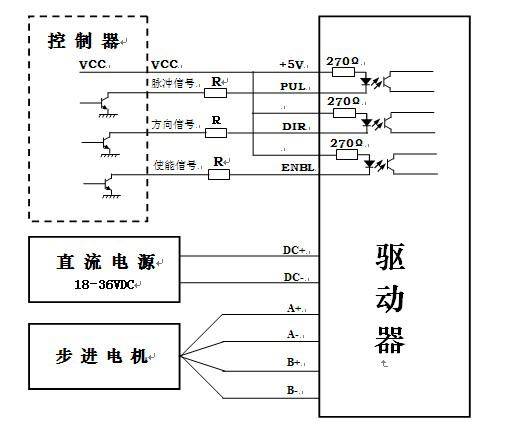
7. Ožičenje voznika
Celoten krmilni sistem koračnih motorjev mora vsebovati koračne pogone, enosmerni napajalnik in krmilnik (impulzni vir).Sledi tipičen diagram ožičenja sistema