Въведение:
DM420A е тип двуфазен хибриден драйвер за стъпков двигател, чието задвижващо напрежение е от 12VDC до 36VDC.Той е проектиран за използване с 2-фазен хибриден стъпков двигател от всякакъв вид с външен диаметър от 20 mm до 42 mm и фазов ток под 2,0 A.Тази схема, която приема, е подобна на веригата за серво управление, което позволява на двигателя да работи гладко почти без шум и вибрации.Въртящият момент, когато DM420A работи при висока скорост, също е значително по-висок от другия двуфазен драйвер, нещо повече, точността на позициониране също е по-висока.Той се използва широко в средни и големи устройства за цифрово управление като машина за извиване, CNC машина и компютърна бродираща машина, опаковъчни машини и т.н.
Характеристика:
l Висока производителност, ниска цена
l Контрол на средния ток, 2-фазен синусоидален изходен ток
l Захранващо напрежение от 12VDC до 36VDC
l Оптоизолиран сигнал I/O
l Защита от пренапрежение, под напрежение, свръхкорекция, защита от фазово късо съединение
l 8 подразделяне на канала и автоматично намаляване на тока на празен ход
l 8 канална настройка на изходния фазов ток
l Офлайн терминал за въвеждане на команди
l Въртящият момент на двигателя е свързан със скоростта, но не е свързан със стъпка/оборот
l Висока стартова скорост
l Висок въртящ момент при висока скорост
Електрическа спецификация:
| Входен волтаж | 12-36VDC |
| Входен ток | < 2A |
| Изходен ток | 0.44A- 2.83A |
| Консумация | Консумация:40W; |
| температура | Работна температура -10~45℃;Температура на съхранение -40℃~70℃ |
| Влажност | Без конденз, без водни капки |
| газ | Забрана за запалими газове и проводящ прах |
| тегло | 70G |
Назначения на пинове и описание:
1) Конфигурации на щифтовете на конектора
| Пин функция | Подробности |
| PUL +,PUL- | Импулсен сигнал, PUL+ е положителният край на импулсния вход pinPUL- е отрицателният край на импулсния вход pin |
| DIR+,DIR- | DIR сигнал: DIR+ е положителният край на входния щифт за посока DIR- е отрицателният край на входния щифт за посока |
| ENBL+ | Сигнал за активиране: ENBL+ е положителният край на входния щифт за посока.Този сигнал се използва за активиране/дезактивиране на драйвера.Високо ниво за активиране на драйвера и ниско ниво за деактивиране на драйвера. |
| ENBL- | ENBL- е отрицателният край на входния щифт за посока.Обикновено остава несвързан (активиран) |
2) Схема на свързване на щифтовете:
Контролните сигнали на компютъра могат да бъдат активни при високо и ниско електрическо ниво.Когато високото електрическо ниво е активно, всички контролни отрицателни сигнали ще бъдат свързани заедно към GND.Когато е активно ниско електрическо ниво, всички контролни положителни сигнали ще бъдат свързани заедно към публичен порт.Сега дайте два примера (Open collector &PNP), моля, проверете ги:

Фигура 1. Верига на входния порт (положителна връзка)
PC отворен конектор изход
Фиг. 2 Верига на входния порт (отрицателна връзка)
PC PNP изход
Забележка: Когато VCC=5V, R=0
Когато VCC=12V, R=1K, >1/8W
Когато VCC=24V, R=2K,>1/8W
R трябва да се свърже в частта на контролния сигнал.
3. Избор на функция (използване на DIP щифтове за постигане на тази функция)
1) Резолюцията на микро стъпки се задава от SW 5,6,7,8 на DIP превключвателя, както е показано в следната таблица:
| SW5 | ON | ИЗКЛ | ON | ИЗКЛ | ON | ИЗКЛ | ON | ИЗКЛ |
| SW6 | ON | ON | ИЗКЛ | ИЗКЛ | ON | ON | ИЗКЛ | ИЗКЛ |
| SW7 | ON | ON | ON | ON | ИЗКЛ | ИЗКЛ | ИЗКЛ | ИЗКЛ |
| Пулс/об | 200 | 400 | 800 | 1600 | 3200 | 6400 | 12800 | 25600 |
| Микро | 1 | 2 | 4 | 8 | 16 | 32 | 64 | 128 |
2) Настройка на тока на покой
За тази цел се използва SW4.OFF означава, че токът на покой е настроен да бъде половината от избрания динамичен ток и ON означава, че токът на покой е настроен да бъде същият като избрания динамичен ток.
3) Настройка на изходния ток:
Първите три бита (SW 1, 2, 3) на DIP превключвателя се използват за настройка на динамичния ток.Изберете настройка
Най-близо до необходимия ток на вашия двигател
| SW1 | SW2 | SW3 | ВРЪХ | RMS |
| ON | ON | ON | 0,44 А | 0,31 А |
| ИЗКЛ | ON | ON | 0,62 А | 0,44 А |
| ON | ИЗКЛ | ON | 0,74 А | 0,52 А |
| ИЗКЛ | ИЗКЛ | ON | 0,86 А | 0,61 А |
| ON | ON | ИЗКЛ | 1.46 A | 1.03 A |
| ИЗКЛ | ON | ИЗКЛ | 1,69 А | 1.20 A |
| ON | ИЗКЛ | ИЗКЛ | 2.14 А | 1.51 A |
| ИЗКЛ | ИЗКЛ | ИЗКЛ | 2.83 А | 2.00 A |
4) Функция на полупоток:
Функцията за полупоток е, че няма стъпков импулс след 200 ms, изходният ток на драйвера автоматично се намалява до 40% от номиналния изходен ток, което се използва за предотвратяване на нагряването на двигателя.
4. Щифтове на мотора и мощността:
| Моторни и захранващи щифтове | 1 | A+ | Окабеляване на двигатели | |
| 2 | A- | |||
| 3 | B+ | |||
| 4 | B- | |||
| 5,6 | DC+ DC- | Захранване | Захранване: DC12-36VDC Пиковият входен ток не може да бъде до 2A |
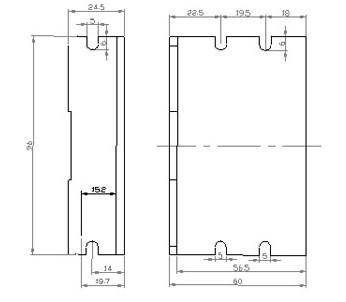
5. Механична спецификация:
За да има 20 мм пространство наоколо, не може да се поставя до други нагревателни уреди.Нещо повече, избягвайте прах, маслена мъгла, корозивни газове, висока влажност и силни вибрации.(Единица = mm)
6. Корекция на отстраняване на неизправности
1), състоянието на светлинна индикация
PWR: зелена, нормална работна светлина.
ALM: червено, светлина за повреда, двигателят с фазово късо съединение, защита от пренапрежение и ниско напрежение.
2) Неприятности
| Индикатор за аларма | Причини | Мерки |
| LED изключване | Грешна връзка за захранване | Проверете захранването |
| Ниски напрежения за мощност | Увеличете захранващото напрежение | |
| Моторът не работи, без да поддържа въртящ момент | Грешно свързване на стъпковия двигател | Коригирайте окабеляването му |
| Сигналът RESET е ефективен, когато е офлайн | Направете RESET неефективен | |
| Моторът не работи, но поддържа въртящ момент | Без входен импулсен сигнал | Регулирайте PMW и нивото на сигнала |
| Моторът работи в грешна посока | Грешна връзка на кабелите | Променете връзката за всеки от 2 проводника |
| Грешен входен сигнал за посока | Промяна на настройката за посока | |
| Задържащият въртящ момент на двигателя е твърде малък | Твърде малък спрямо текущата настройка | Правилна настройка на номиналния ток |
| Ускорението е твърде бързо | Намалете ускорението | |
| Моторът спира | Изключете механична повреда | |
| Драйверът не съвпада с двигателя | Сменете подходящ драйвер |
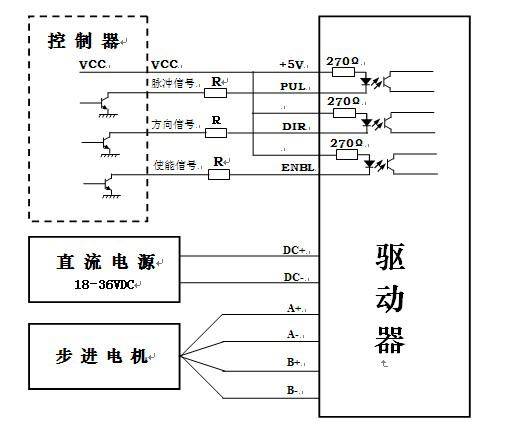
7. Окабеляване на водача
Пълната система за управление на стъпкови двигатели трябва да съдържа стъпкови задвижвания, захранване с постоянен ток и контролер (източник на импулси).Следното е типична схема на свързване на системата