Introdución:
DM420A é un tipo de controlador de motor paso a paso híbrido bifásico, cuxa tensión de accionamento é de 12VDC a 36VDC.Está deseñado para o seu uso con motor paso a paso híbrido de 2 fases de todo tipo con un diámetro exterior de 20 mm a 42 mm e unha corrente de fase inferior a 2,0 A.Este circuíto que adopta é semellante ao circuíto de servocontrol que permite que o motor funcione sen problemas case sen ruídos nin vibracións.O par de hording cando o DM420A funciona a alta velocidade tamén é significativamente maior que o outro controlador de dúas fases, ademais, a precisión de posicionamento tamén é maior.É amplamente utilizado en dispositivos de control numérico de tamaño medio e grande, como máquina de curvar, máquina CNC e máquina de bordar por ordenador, máquinas de envasado, etc.
Características:
l Alto rendemento, baixo prezo
l Control de corrente media, accionamento de corrente de saída sinusoidal de 2 fases
l Tensión de alimentación de 12VDC a 36VDC
l E/S de sinal optoisolado
l Protección contra sobretensión, subtensión, sobrecorrección e curtocircuíto de fase
l Subdivisión de 8 canles e redución automática da corrente inactiva
l Configuración de corrente de fase de saída de 8 canles
l Terminal de entrada de comandos fóra de liña
l O par motor está relacionado coa velocidade, pero non co paso/revolución
l Alta velocidade de arranque
l Alto par de hording a alta velocidade
Especificación eléctrica:
| Tensión de entrada | 12-36 VDC |
| Corrente de entrada | < 2A |
| Corrente de saída | 0,44A-2,83A |
| Consumo | Consumo:40W; |
| Temperatura | Temperatura de traballo -10 ~ 45 ℃; temperatura de almacenamento -40 ℃ ~ 70 ℃ |
| Humidade | Sen condensación, sen gotas de auga |
| gas | Prohibición de gases combustibles e po condutor |
| peso | 70G |
Asignacións e descrición dos pinos:
1) Configuración de pinos do conector
| Función Pin | Detalles |
| PUL +, PUL- | Sinal de pulso, PUL+ é o extremo positivo do pin de entrada de pulsosPUL- é o extremo negativo do pin de entrada de pulso |
| DIR+,DIR- | Sinal DIR: DIR+ é o extremo positivo do pin de entrada de dirección DIR- é o extremo negativo do pin de entrada de dirección |
| ENBL+ | Sinal de activación: ENBL+ é o extremo positivo do pin de entrada de dirección.Este sinal úsase para activar/desactivar o controlador.Nivel alto para habilitar o controlador e nivel baixo para desactivalo. |
| ENBL- | ENBL- é o extremo negativo do pin de entrada de dirección.Normalmente non se conecta (activado) |
2) Diagrama de cableado de pinos:
Os sinais de control do PC poden estar activos a nivel eléctrico alto e baixo.Cando o nivel eléctrico alto está activo, todos os sinais negativos de control conectaranse xuntos a GND.Cando o nivel eléctrico baixo está activo, todos os sinais positivos de control conectaranse xuntos ao porto público.Agora pon dous exemplos (colector aberto e PNP), comprobeos:

Fig 1. Circuíto do porto de entrada (conexión positiva)
Saída do conector aberto do PC
Fig. 2 Circuíto do porto de entrada (conexión negativa)
Saída PNP para PC
Nota: Cando VCC=5V, R=0
Cando VCC=12V, R=1K, >1/8W
Cando VCC=24V, R=2K,>1/8W
R debe conectarse na parte do sinal de control.
3. Elección da función (usando pins DIP para conseguir esta función)
1) A resolución de micro-pasos establécese polo SW 5,6,7,8 do interruptor DIP como se mostra na seguinte táboa:
| SW5 | ON | DESACTIVADO | ON | DESACTIVADO | ON | DESACTIVADO | ON | DESACTIVADO |
| SW6 | ON | ON | DESACTIVADO | DESACTIVADO | ON | ON | DESACTIVADO | DESACTIVADO |
| SW7 | ON | ON | ON | ON | DESACTIVADO | DESACTIVADO | DESACTIVADO | DESACTIVADO |
| Pulso/rev | 200 | 400 | 800 | 1600 | 3200 | 6400 | 12800 | 25600 |
| Micro | 1 | 2 | 4 | 8 | 16 | 32 | 64 | 128 |
2) Configuración da corrente de parada
SW4 utilízase para este fin.OFF significa que a corrente de parada está configurada para ser a metade da corrente dinámica seleccionada e ON significa que a parada está configurada para ser a mesma que a corrente dinámica seleccionada.
3) Configuración da corrente de saída:
Os tres primeiros bits (SW 1, 2, 3) do interruptor DIP utilízanse para establecer a corrente dinámica.Seleccione unha configuración
O máis próximo á corrente necesaria do teu motor
| SW1 | SW2 | SW3 | PICO | RMS |
| ON | ON | ON | 0,44 A | 0,31 A |
| DESACTIVADO | ON | ON | 0,62 A | 0,44 A |
| ON | DESACTIVADO | ON | 0,74 A | 0,52 A |
| DESACTIVADO | DESACTIVADO | ON | 0,86 A | 0,61 A |
| ON | ON | DESACTIVADO | 1,46 A | 1,03 A |
| DESACTIVADO | ON | DESACTIVADO | 1,69 A | 1,20 A |
| ON | DESACTIVADO | DESACTIVADO | 2.14 A | 1,51 A |
| DESACTIVADO | DESACTIVADO | DESACTIVADO | 2,83 A | 2.00 A |
4) Función de semifluxo:
A función de semifluxo é que non hai pulso de paso despois de 200 ms, a corrente de saída do controlador redúcese automaticamente ao 40% da corrente de saída nominal, que se usa para evitar a calor do motor.
4. Pins de motor e potencia:
| Pins de motor e potencia | 1 | A+ | Cableado de motores | |
| 2 | A- | |||
| 3 | B+ | |||
| 4 | B- | |||
| 5,6 | DC+ DC- | Fonte de alimentación | Fonte de alimentación: DC12-36VDC A corrente de entrada máxima non pode ser de ata 2A |
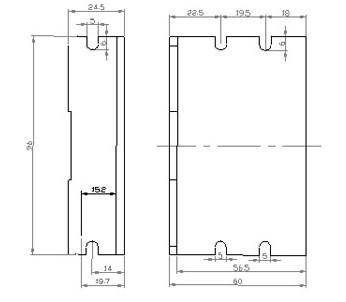
5. Especificación mecánica:
Para ter 20 mm de espazo ao redor, non se pode colocar xunto a outros dispositivos de calefacción.Ademais, evite o po, a néboa de aceite, os gases corrosivos, a humidade intensa e as vibracións elevadas.(unidade = mm)
6. Axuste da resolución de problemas
1), o estado na indicación da luz
PWR: verde, luz normal de traballo.
ALM: vermello, luz de avaría, o motor con protección contra curtocircuíto de fase, sobretensión e subtensión.
2) Problemas
| Indicador de alarma | Razóns | Medidas |
| LED apagado | Conexión incorrecta para a alimentación | Comprobe o cableado de alimentación |
| Baixas tensións para enerxía | Aumentar a tensión de potencia | |
| O motor non funciona, sen manter o par | Conexión incorrecta do motor paso a paso | Corrixe o seu cableado |
| O sinal de RESET é efectivo cando está fóra de liña | Fai que o RESET non sexa efectivo | |
| O motor non funciona, pero mantén o par | Sen sinal de pulso de entrada | Axuste PMW e nivel de sinal |
| O motor vai en dirección incorrecta | Conexión de cables incorrecta | Cambia a conexión por calquera dos 2 cables |
| Sinal de dirección de entrada incorrecto | Cambiar a configuración de dirección | |
| O par de retención do motor é demasiado pequeno | Demasiado pequeno en relación á configuración actual | Configuración de corrente nominal correcta |
| A aceleración é demasiado rápida | Reducir a aceleración | |
| Paradas de motores | Descartar fallos mecánicos | |
| O condutor non coincide co motor | Cambiar un controlador axeitado |
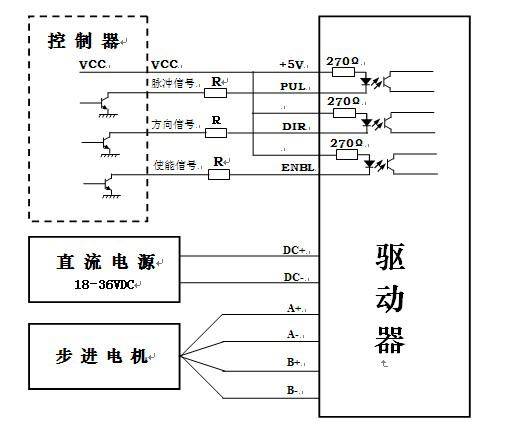
7. Cableado do controlador
Un sistema de control de motor paso a paso completo debe conter unidades de paso, fonte de alimentación de CC e controlador (fonte de pulso).O seguinte é un diagrama de cableado típico do sistema