מבוא:
DM420A הוא סוג של נהג מנוע צעד היברידי דו-פאזי, שמתח ההנעה שלו הוא בין 12VDC ל-36VDC.הוא מיועד לשימוש עם מנוע צעד היברידי דו-פאזי מכל הסוגים בקוטר חיצוני של 20 מ"מ עד 42 מ"מ וזרם פאזה של פחות מ-2.0A.מעגל זה שהיא מאמצת דומה למעגל בקרת סרוו המאפשר למנוע לפעול בצורה חלקה כמעט ללא רעש ורעידות.מומנט ההורדה כאשר DM420A פועל במהירות גבוהה הוא גם גבוה משמעותית מהדרייבר הדו-פאזי האחר, מה גם שדיוק המיקום גבוה יותר.הוא נמצא בשימוש נרחב בהתקני בקרה מספריים בגודל בינוני וגדול כגון מכונת עיקול, מכונת CNC ומכונת רקמת מחשב, מכונות אריזה וכן הלאה.
מאפיינים:
l ביצועים גבוהים, מחיר נמוך
l בקרת זרם ממוצע, כונן זרם פלט סינוסואידי דו-פאזי
l מתח אספקה מ-12VDC עד 36VDC
l אות I/O מבודד אופטו
l הגנה על מתח יתר, תת-מתח, נכון מדי, הגנה על קצר בפאזה
l חלוקת משנה של 8 ערוצים והפחתת זרם סרק אוטומטי
l הגדרת זרם שלב פלט של 8 ערוצים
l מסוף קלט פקודה לא מקוון
l מומנט המנוע קשור למהירות, אך לא קשור לצעד/סיבוב
l מהירות התחלה גבוהה
l מומנט איסוף גבוה במהירות גבוהה
מפרט חשמלי:
| מתח נכנס | 12-36VDC |
| זרם קלט | < 2A |
| זרם מוצא | 0.44A- 2.83A |
| צְרִיכָה | צְרִיכָה:40W; |
| טֶמפֶּרָטוּרָה | טמפרטורת עבודה -10~45℃;טמפרטורת מלאי -40℃~70℃ |
| לחות | לא עיבוי, ללא טיפות מים |
| גַז | איסור על גזים דליקים ואבק מוליך |
| מִשׁקָל | 70G |
מטלות סיכות ותיאור:
1) תצורות פינים של מחברים
| פונקציית פינים | פרטים |
| PUL +,PUL- | אות דופק, PUL+ הוא הקצה החיובי של פין כניסת הפולסיםPUL- הוא הקצה השלילי של פין כניסת הפולסים |
| DIR+,DIR- | אות DIR: DIR+ הוא הקצה החיובי של כניסת הכיוון פיןDIR- הוא הקצה השלילי של כניסת הכיוון |
| ENBL+ | אות הפעלה: ENBL+ הוא הקצה החיובי של פין קלט הכיוון.אות זה משמש להפעלה/השבתה של מנהל ההתקן.רמה גבוהה להפעלת הנהג ורמה נמוכה לנטרול הנהג. |
| ENBL- | ENBL- הוא הקצה השלילי של פין קלט הכיוון.בדרך כלל לא מחובר (מופעל) |
2) דיאגרמת חיווט פינים:
אותות הבקרה של PC יכולים להיות פעילים ברמה חשמלית גבוהה ונמוכה.כאשר הרמה החשמלית הגבוהה פעילה, כל האותות השליליים של הבקרה יחוברו יחד ל-GND.כאשר רמת חשמל נמוכה פעילה, כל האותות החיוביים של הבקרה יחוברו יחד ליציאה ציבורית.כעת תן שתי דוגמאות (פתח אספן &PNP), אנא בדוק אותן:

איור 1. מעגל יציאת קלט (חיבור חיובי)
פלט מחבר פתוח למחשב
איור 2 מעגל יציאת כניסה (חיבור שלילי)
פלט PNP למחשב
הערה: כאשר VCC=5V, R=0
כאשר VCC=12V, R=1K, ±1/8W
כאשר VCC=24V, R=2K, ~1/8W
R חייב להתחבר בחלק אות הבקרה.
3. בחירת פונקציה (שימוש בפיני DIP כדי להשיג פונקציה זו)
1) רזולוציית מיקרו-שלב מוגדרת על ידי SW 5,6,7,8 של מתג DIP כפי שמוצג בטבלה הבאה:
| SW5 | ON | כבוי | ON | כבוי | ON | כבוי | ON | כבוי |
| SW6 | ON | ON | כבוי | כבוי | ON | ON | כבוי | כבוי |
| SW7 | ON | ON | ON | ON | כבוי | כבוי | כבוי | כבוי |
| דופק / סיבוב | 200 | 400 | 800 | 1600 | 3200 | 6400 | 12800 | 25600 |
| מיקרו | 1 | 2 | 4 | 8 | 16 | 32 | 64 | 128 |
2) הגדרת זרם עמידה
SW4 משמש למטרה זו.OFF כלומר זרם העמידה מוגדר להיות מחצית מהזרם הדינמי שנבחר ו-ON כלומר שהעמידה מוגדרת להיות זהה לזרם הדינמי שנבחר.
3) הגדרת זרם פלט:
שלושת הסיביות הראשונות (SW 1, 2, 3) של מתג DIP משמשות להגדרת הזרם הדינמי.בחר הגדרה
הכי קרוב לזרם הנדרש של המנוע שלך
| SW1 | SW2 | SW3 | שִׂיא | RMS |
| ON | ON | ON | 0.44 א | 0.31 א |
| כבוי | ON | ON | 0.62 א | 0.44 א |
| ON | כבוי | ON | 0.74 א | 0.52 א |
| כבוי | כבוי | ON | 0.86 א | 0.61 א |
| ON | ON | כבוי | 1.46 א | 1.03 א |
| כבוי | ON | כבוי | 1.69 א | 1.20 א |
| ON | כבוי | כבוי | 2.14 א | 1.51 א |
| כבוי | כבוי | כבוי | 2.83 א | 2.00 א |
4) פונקציית זרימה למחצה:
פונקציית חצי-זרימה היא שאין דופק צעד לאחר 200 שניות, זרם הפלט של הנהג מופחת אוטומטית ל-40% מזרם הפלט המדורג, המשמש למניעת חום המנוע.
4. פינים של מנוע וכוח:
| פיני מנוע וכוח | 1 | A+ | חיווט מנועים | |
| 2 | A- | |||
| 3 | B+ | |||
| 4 | B- | |||
| 5,6 | DC+ DC- | ספק כוח | ספק כוח :DC12-36VDC שיא זרם הכניסה לא יכול להיות עד 2A |
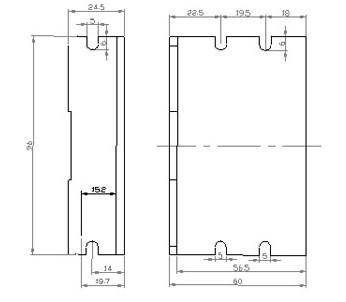
5. מפרט מכני:
כדי שיהיה 20 מ"מ של שטח מסביב, לא ניתן להציב אותו ליד התקני חימום אחרים.יתרה מכך, הימנע מאבק, ערפל שמן, גז קורוזיבי, לחות כבדה ורטט גבוה.(יחידה=מ"מ)
6. התאמה של פתרון תקלות
1), המצב על חיווי האור
PWR: ירוק, נורת עבודה רגילה.
ALM: אדום, נורית כשל, המנוע עם הגנה על קצר פאזה, מתח יתר ותת-מתח.
2) צרות
| מחוון אזעקה | סיבות | אמצעים |
| כבוי LED | חיבור שגוי לחשמל | בדוק את חיווט החשמל |
| מתחים נמוכים להספק | הגדל את מתח הכוח | |
| המנוע לא פועל, בלי להחזיק מומנט | חיבור שגוי של מנוע צעד | תקן את החיווט שלו |
| אות איפוס יעיל במצב לא מקוון | הפוך את RESET ללא יעיל | |
| המנוע אינו פועל, אך שומר על מומנט החזקה | ללא אות דופק כניסה | התאם את רמת ה-PMW ורמת האות |
| המנוע פועל בכיוון הלא נכון | חיבור חוטים שגויים | שנה חיבור עבור כל אחד מ-2 חוטים |
| אות כיוון כניסה שגוי | שנה את הגדרת הכיוון | |
| מומנט האחיזה של המנוע קטן מדי | קטן מדי ביחס להגדרה הנוכחית | תקן הגדרה נוכחית מדורגת |
| האצה מהירה מדי | הפחת את התאוצה | |
| דוכני מנוע | לשלול כשל מכני | |
| הנהג לא תואם למנוע | שנה דרייבר מתאים |
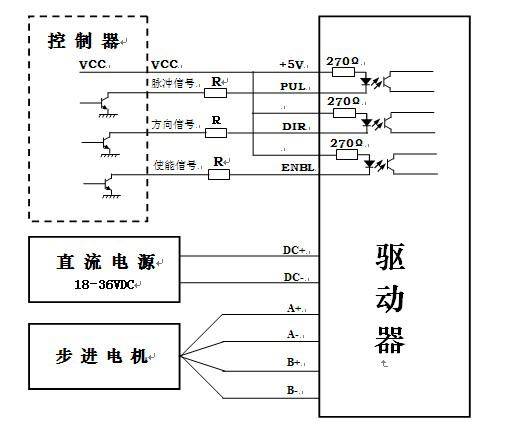
7. חיווט דרייבר
מערכת בקרת מנוע צעד שלמה צריכה להכיל כונני צעד, ספק כוח DC ובקר (מקור דופק).להלן תרשים חיווט טיפוסי של המערכת