សេចក្តីផ្តើម៖
DM420A គឺជាប្រភេទម៉ូទ័រ hybrid stepping motor ពីរដំណាក់កាល ដែលវ៉ុលរបស់ drive មានចាប់ពី 12VDC ដល់ 36VDC។វាត្រូវបានរចនាឡើងសម្រាប់ប្រើជាមួយម៉ូទ័រ stepper កូនកាត់ 2 ដំណាក់កាលគ្រប់ប្រភេទដែលមានអង្កត់ផ្ចិតខាងក្រៅ 20mm ទៅ 42mm និងចរន្តតិចជាង 2.0A។សៀគ្វីនេះដែលវាទទួលយកគឺស្រដៀងទៅនឹងសៀគ្វីនៃការគ្រប់គ្រង servo ដែលអាចឱ្យម៉ូទ័រដំណើរការដោយរលូនស្ទើរតែគ្មានសំលេងរំខាននិងរំញ័រ។កម្លាំងបង្វិលជុំនៅពេល DM420A រត់ក្រោមល្បឿនលឿនក៏ខ្ពស់ជាងអ្នកបើកបរពីរដំណាក់កាលផ្សេងទៀត អ្វីដែលកាន់តែពិសេស ភាពត្រឹមត្រូវនៃទីតាំងក៏ខ្ពស់ជាងផងដែរ។វាត្រូវបានគេប្រើយ៉ាងទូលំទូលាយនៅក្នុងឧបករណ៍ត្រួតពិនិត្យលេខខ្នាតកណ្តាល និងធំដូចជាម៉ាស៊ីនកោង ម៉ាស៊ីន CNC និងម៉ាស៊ីនប៉ាក់កុំព្យូទ័រ ម៉ាស៊ីនវេចខ្ចប់ជាដើម។
លក្ខណៈពិសេស៖
l ប្រសិទ្ធភាពខ្ពស់ តម្លៃទាប
l ការគ្រប់គ្រងបច្ចុប្បន្នជាមធ្យម ដ្រាយចរន្តទិន្នផល sinusoidal 2 ដំណាក់កាល
l ផ្គត់ផ្គង់វ៉ុលពី 12VDC ទៅ 36VDC
l សញ្ញាដាច់ពីគ្នា Opto I/O
l Overvoltage, នៅក្រោមវ៉ុល, overcorrect, ដំណាក់កាលការពារសៀគ្វីខ្លី
l ផ្នែករង 8 ប៉ុស្តិ៍ និងការកាត់បន្ថយចរន្តដោយស្វ័យប្រវត្តិ
l 8 channels output phase ការកំណត់បច្ចុប្បន្ន
l ស្ថានីយបញ្ចូលពាក្យបញ្ជាក្រៅបណ្តាញ
l កម្លាំងបង្វិលម៉ូទ័រទាក់ទងជាមួយល្បឿន ប៉ុន្តែមិនទាក់ទងទៅនឹងជំហាន/បដិវត្តន៍ទេ។
l ល្បឿនចាប់ផ្តើមខ្ពស់។
l កម្លាំងបង្វិលជុំខ្ពស់ក្រោមល្បឿនលឿន
លក្ខណៈបច្ចេកទេសអគ្គិសនី៖
| បញ្ចូលតង់ស្យុង | 12-36VDC |
| បញ្ចូលចរន្ត | 2A |
| ទិន្នផលបច្ចុប្បន្ន | 0.44A- 2.83A |
| ការប្រើប្រាស់ | ការប្រើប្រាស់៖40W |
| សីតុណ្ហភាព | សីតុណ្ហភាពការងារ -10~45℃; សីតុណ្ហភាពស្តុក -40℃~70℃ |
| សំណើម | មិនខាប់ គ្មានដំណក់ទឹក។ |
| ឧស្ម័ន | ការហាមឃាត់ឧស្ម័នដែលអាចឆេះបាន និងធូលីដែលអាចឆេះបាន។ |
| ទម្ងន់ | 70 ក្រាម។ |
ខ្ទាស់កិច្ចការ និងការពិពណ៌នា៖
1) ការកំណត់រចនាសម្ព័ន្ធម្ជុលរបស់ឧបករណ៍ភ្ជាប់
| មុខងារខ្ទាស់ | ព័ត៌មានលម្អិត |
| PUL +, PUL- | សញ្ញាជីពចរ PUL+ គឺជាចុងវិជ្ជមាននៃការបញ្ចូលជីពចរ pinPUL- គឺជាចុងអវិជ្ជមាននៃម្ជុលបញ្ចូលជីពចរ |
| DIR+,DIR- | សញ្ញា DIR៖ DIR+ គឺជាចុងវិជ្ជមាននៃទិសដៅបញ្ចូល pinDIR- គឺជាចុងអវិជ្ជមាននៃម្ជុលបញ្ចូលទិសដៅ |
| ENBL+ | បើកសញ្ញា៖ ENBL+ គឺជាចុងវិជ្ជមាននៃម្ជុលបញ្ចូលទិសដៅ។សញ្ញានេះត្រូវបានប្រើសម្រាប់បើក/បិទកម្មវិធីបញ្ជា។កម្រិតខ្ពស់សម្រាប់បើកអ្នកបើកបរ និងកម្រិតទាបសម្រាប់បិទអ្នកបើកបរ។ |
| ENBL- | ENBL- គឺជាចុងអវិជ្ជមាននៃម្ជុលបញ្ចូលទិសដៅ។ជាធម្មតាទុកចោលដោយមិនភ្ជាប់ (បើក) |
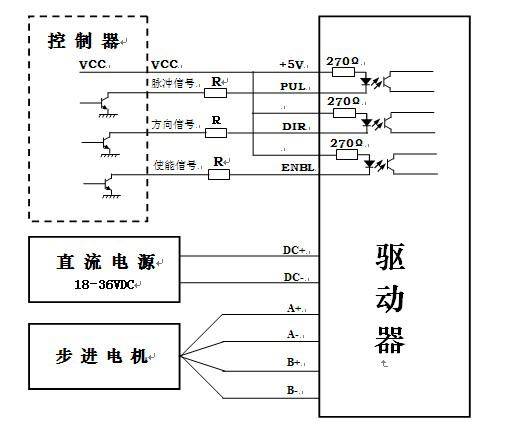
2) ដ្យាក្រាមខ្សែភ្លើង៖
សញ្ញាបញ្ជារបស់កុំព្យូទ័រអាចសកម្មក្នុងកម្រិតអគ្គិសនីខ្ពស់ និងទាប។នៅពេលដែលកម្រិតអគ្គិសនីខ្ពស់សកម្ម សញ្ញាអវិជ្ជមាននៃការគ្រប់គ្រងទាំងអស់នឹងត្រូវបានភ្ជាប់ជាមួយគ្នាទៅ GND ។នៅពេលដែលកម្រិតអគ្គិសនីទាបសកម្ម សញ្ញាវិជ្ជមាននៃការគ្រប់គ្រងទាំងអស់នឹងត្រូវបានភ្ជាប់ជាមួយគ្នាទៅកាន់ច្រកសាធារណៈ។ឥឡូវនេះសូមផ្តល់ឧទាហរណ៍ពីរ (បើកអ្នកប្រមូល & PNP) សូមពិនិត្យមើលពួកវា៖

រូបភាពទី 1. សៀគ្វីច្រកបញ្ចូល (ការតភ្ជាប់វិជ្ជមាន)
លទ្ធផលឧបករណ៍ភ្ជាប់បើកកុំព្យូទ័រ
រូបភាពទី 2 សៀគ្វីច្រកបញ្ចូល (ការតភ្ជាប់អវិជ្ជមាន)
លទ្ធផល PC PNP
ចំណាំ៖ ពេល VCC=5V, R=0
នៅពេល VCC = 12V, R = 1K, >1/8W
នៅពេល VCC=24V, R=2K,>1/8W
R ត្រូវតែភ្ជាប់នៅក្នុងផ្នែកសញ្ញាបញ្ជា។
3.ជម្រើសមុខងារ (ដោយប្រើម្ជុល DIP ដើម្បីសម្រេចបាននូវមុខងារនេះ)
1) ដំណោះស្រាយជំហានខ្នាតតូចត្រូវបានកំណត់ដោយ SW 5,6,7,8 នៃកុងតាក់ DIP ដូចដែលបានបង្ហាញក្នុងតារាងខាងក្រោម៖
| SW5 | ON | បិទ | ON | បិទ | ON | បិទ | ON | បិទ |
| SW6 | ON | ON | បិទ | បិទ | ON | ON | បិទ | បិទ |
| SW7 | ON | ON | ON | ON | បិទ | បិទ | បិទ | បិទ |
| ជីពចរ / វិ | ២០០ | ៤០០ | ៨០០ | ១៦០០ | ៣២០០ | ៦៤០០ | 12800 | ២៥៦០០ |
| មីក្រូ | 1 | 2 | 4 | 8 | 16 | 32 | 64 | ១២៨ |
2) ការកំណត់បច្ចុប្បន្ន
SW4 ត្រូវបានប្រើសម្រាប់គោលបំណងនេះ។OFF មានន័យថា ចរន្តជាប់គាំងត្រូវបានកំណត់ជាពាក់កណ្តាលនៃចរន្តថាមវន្តដែលបានជ្រើសរើស និង ON មានន័យថាការផ្អាកត្រូវបានកំណត់ដូចគ្នាទៅនឹងចរន្តថាមវន្តដែលបានជ្រើសរើស។
3) ទិន្នផលការកំណត់បច្ចុប្បន្ន:
បីប៊ីតដំបូង (SW 1, 2, 3) នៃកុងតាក់ DIP ត្រូវបានប្រើដើម្បីកំណត់ចរន្តថាមវន្ត។ជ្រើសរើសការកំណត់
ជិតបំផុតទៅនឹងចរន្តដែលត្រូវការរបស់ម៉ូទ័ររបស់អ្នក។
| SW1 | SW2 | SW3 | កំពូល | RMS |
| ON | ON | ON | 0.44 ក | 0.31 ក |
| បិទ | ON | ON | 0.62 ក | 0.44 ក |
| ON | បិទ | ON | 0.74 ក | 0.52 ក |
| បិទ | បិទ | ON | 0.86 ក | 0.61 ក |
| ON | ON | បិទ | ១.៤៦ ក | 1.03 ក |
| បិទ | ON | បិទ | 1.69 ក | 1.20 ក |
| ON | បិទ | បិទ | ២.១៤ ក | ១.៥១ ក |
| បិទ | បិទ | បិទ | ២.៨៣ ក | 2.00 អេ |
4) មុខងារពាក់កណ្តាលលំហូរ៖
មុខងារពាក់កណ្តាលលំហូរគឺថាមិនមានជីពចរជំហានបន្ទាប់ពី 200 ms ចរន្តទិន្នផលរបស់អ្នកបើកបរបានកាត់បន្ថយដោយស្វ័យប្រវត្តិទៅ 40% នៃចរន្តទិន្នផលដែលបានវាយតម្លៃ ដែលត្រូវបានប្រើដើម្បីការពារកំដៅម៉ូទ័រ។
4. ម្ជុលម៉ូទ័រ និងថាមពល៖
| ម៉ូទ័រនិងម្ជុលថាមពល | 1 | A+ | ខ្សែភ្លើងម៉ូទ័រ | |
| 2 | A- | |||
| 3 | B+ | |||
| 4 | B- | |||
| ៥,៦ | DC+ DC- | ការផ្គត់ផ្គង់ថាមពល | ការផ្គត់ផ្គង់ថាមពល៖ DC12-36VDC ចរន្តបញ្ចូលខ្ពស់បំផុតមិនអាចឡើងដល់ 2A |
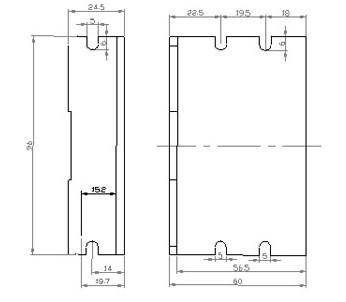
5. លក្ខណៈបច្ចេកទេស៖
ដើម្បីឱ្យមានទំហំ 20mm ជុំវិញ មិនអាចដាក់នៅក្បែរឧបករណ៍កំដៅផ្សេងទៀតបានទេ។លើសពីនេះ ជៀសវាងធូលី ធូលី ប្រេង ឧស្ម័នច្រេះ សំណើមខ្លាំង និងរំញ័រខ្ពស់។(ឯកតា = មម)
6. ការកែតម្រូវការដោះស្រាយបញ្ហា
1) ស្ថានភាពនៅលើសញ្ញានៃពន្លឺ
PWR: ពណ៌បៃតង ពន្លឺការងារធម្មតា។
ALM: ពណ៌ក្រហម, ភ្លើងបរាជ័យ, ម៉ូទ័រដែលមានសៀគ្វីខ្លីដំណាក់កាល, overvoltage និងការការពារក្រោមវ៉ុល។
2) បញ្ហា
| សូចនាករសំឡេងរោទិ៍ | ហេតុផល | វិធានការ |
| បិទ LED | ការតភ្ជាប់ខុសសម្រាប់ថាមពល | ពិនិត្យខ្សែភ្លើង |
| វ៉ុលទាបសម្រាប់ថាមពល | ពង្រីកវ៉ុលនៃថាមពល | |
| ម៉ូទ័រមិនដំណើរការដោយគ្មានកម្លាំងបង្វិល | ការតភ្ជាប់មិនត្រឹមត្រូវនៃម៉ូទ័រ stepper | ជួសជុលខ្សែរបស់វា។ |
| សញ្ញា RESET មានប្រសិទ្ធភាពនៅពេលគ្មានអ៊ីនធឺណិត | ធ្វើឱ្យ RESET គ្មានប្រសិទ្ធភាព | |
| ម៉ូទ័រមិនដំណើរការទេ ប៉ុន្តែរក្សាកម្លាំងបង្វិលជុំ | ដោយគ្មានសញ្ញាជីពចរបញ្ចូល | លៃតម្រូវ PMW & កម្រិតសញ្ញា |
| ម៉ូទ័ររត់ខុសទិសដៅ | ការភ្ជាប់ខ្សែខុស | ផ្លាស់ប្តូរការតភ្ជាប់សម្រាប់ខ្សែណាមួយនៃ 2 ខ្សែ |
| សញ្ញាទិសដៅបញ្ចូលខុស | ផ្លាស់ប្តូរការកំណត់ទិសដៅ | |
| កម្លាំងបង្វិលរបស់ម៉ូទ័រតូចពេក | តូចពេកទាក់ទងនឹងការកំណត់បច្ចុប្បន្ន | ការកំណត់បច្ចុប្បន្នដែលបានវាយតម្លៃត្រឹមត្រូវ។ |
| ការបង្កើនល្បឿនគឺលឿនពេក | កាត់បន្ថយការបង្កើនល្បឿន | |
| តូបម៉ូតូ | បដិសេធការបរាជ័យមេកានិច | |
| អ្នកបើកបរមិនត្រូវគ្នានឹងម៉ូទ័រទេ។ | ផ្លាស់ប្តូរអ្នកបើកបរសមរម្យ |
7. ខ្សែភ្លើងអ្នកបើកបរ
ប្រព័ន្ធគ្រប់គ្រងម៉ូទ័រ stepper ពេញលេញគួរតែមានដ្រាយ stepper ការផ្គត់ផ្គង់ថាមពល DC និងឧបករណ៍បញ្ជា (ប្រភពជីពចរ) ។ខាងក្រោមនេះគឺជាដ្យាក្រាមខ្សែប្រព័ន្ធធម្មតា។