နိဒါန်း-
DM420A သည် two-phase hybrid stepping motor driver အမျိုးအစားဖြစ်ပြီး drive voltage သည် 12VDC မှ 36VDC အထိဖြစ်သည်။၎င်းကို 2-phase hybrid stepper motor နှင့် 20mm မှ 42mm ပြင်ပအချင်းနှင့် 2.0A phase current ထက်နည်းသော အမျိုးအစားအားလုံးအတွက် အသုံးပြုရန်အတွက် ဒီဇိုင်းထုတ်ထားပါသည်။၎င်းအသုံးပြုသည့် circuit သည် ဆူညံသံနှင့် တုန်ခါမှုမရှိဘဲ မော်တာအား ချောမွေ့စွာလည်ပတ်နိုင်စေသည့် servo control circuit နှင့် ဆင်တူသည်။DM420A သည် မြန်နှုန်းမြင့်သည့်အရှိန်အောက်တွင် လည်ပတ်သောအခါ Hording torque သည် အခြားသော အဆင့်နှစ်ဆင့်မောင်းသူများထက် သိသိသာသာ မြင့်မားသည်၊ ထို့ထက်မက၊ positioning တိကျမှုမှာလည်း ပိုမိုမြင့်မားပါသည်။ကွေးစက်၊ CNC စက်၊ ကွန်ပြူတာ ပန်းထိုးစက်၊ ထုပ်ပိုးစက်စသည်ဖြင့် အလယ်အလတ်နှင့် အကြီးစား ဂဏန်းထိန်းချုပ်ကိရိယာများတွင် တွင်ကျယ်စွာ အသုံးပြုသည်။
အင်္ဂါရပ်များ:
l မြင့်မားသောစွမ်းဆောင်ရည်၊ စျေးနှုန်းချိုသာသည်။
l ပျမ်းမျှလက်ရှိထိန်းချုပ်မှု၊ 2-phase sinusoidal output လက်ရှိ drive
l 12VDC မှ 36VDC အထိ ပံ့ပိုးပေးပါသည်။
l Opto-isolated signal I/O
l Overvoltage, under voltage, overcorrect, phase short circuit အကာအကွယ်
l 8 လိုင်းခွဲပိုင်းနှင့် အလိုအလျောက် idle-current လျှော့ချခြင်း။
l ချန်နယ် ၈ ခု အထွက်အဆင့် လက်ရှိ ဆက်တင်
l အော့ဖ်လိုင်းအမိန့်ပေးထည့်သွင်းသည့်ဂိတ်
l Motor torque သည် အမြန်နှုန်းနှင့် ဆက်စပ်သော်လည်း ခြေလှမ်း/တော်လှန်ရေးနှင့် မသက်ဆိုင်ပါ။
l မြင့်မားသောစတင်မြန်နှုန်း
l မြင့်မားသောအရှိန်အောက်တွင် hording torque မြင့်မားသည်။
လျှပ်စစ်သတ်မှတ်ချက်
| အဝင်ဗို့အား | 12-36VDC |
| ထည့်သွင်းခြင်း လက်ရှိ | < 2A |
| Output လက်ရှိ | 0.44A- 2.83A |
| စားသုံးမှု | စားသုံးမှု-40W |
| အပူချိန် | အလုပ်အပူချိန် -10 ~ 45 ℃ ; သိုလှောင်အပူချိန် - 40 ℃ မှ 70 ℃ |
| စိုထိုင်းဆ | ငွေ့ရည်ဖွဲ့ခြင်းမဟုတ်ပါ၊ ရေစက်များမရှိပါ။ |
| ဓာတ်ငွေ့ | လောင်ကျွမ်းနိုင်သော ဓာတ်ငွေ့များနှင့် လျှပ်ကူးနိုင်သော ဖုန်မှုန့်များကို တားမြစ်ထားသည်။ |
| ကိုယ်အလေးချိန် | 70G |
တာဝန်များနှင့် ဖော်ပြချက်ကို ပင်ထိုးပါ-
1) Connector Pins Configurations
| Pin Function | အသေးစိတ် |
| PUL+၊PUL- | Pulse signal၊ PUL+ သည် pulse input pinPUL- သည် pulse input pin ၏ အနုတ်အဆုံးဖြစ်သည် |
| DIR+၊DIR- | DIR အချက်ပြ- DIR+ သည် ဦးတည်ချက်ထည့်သွင်းမှု၏ အပြုသဘောဆောင်သည့်အဆုံး PinDIR- သည် ဦးတည်ချက်ထည့်သွင်းမှု၏ အနုတ်လက္ခဏာအဆုံးဖြစ်သည်။ |
| ENBL+ | အချက်ပြမှုကို ဖွင့်ပါ- ENBL+ သည် ဦးတည်ချက်ထည့်သွင်းသည့် ပင်နံပါတ်၏ အပြုသဘောဆောင်သည့် အဆုံးဖြစ်သည်။ဤအချက်ပြမှုကို ယာဉ်မောင်းအား ဖွင့်/ပိတ်ရန်အတွက် အသုံးပြုသည်။ယာဉ်မောင်းကို ဖွင့်ရန်အတွက် မြင့်မားသောအဆင့်နှင့် ယာဉ်မောင်းကို ပိတ်ထားရန် အဆင့်နိမ့်။ |
| ENBL- | ENBL- သည် ဦးတည်ချက်ထည့်သွင်းသည့် ပင်နံပါတ်၏ အနုတ်လက္ခဏာအဆုံးဖြစ်သည်။အများအားဖြင့် ချိတ်ဆက်မထားသော (ဖွင့်ထားသည်) |
2) Pins ဝိုင်ယာပုံကြမ်း
PC ၏ ထိန်းချုပ်မှု အချက်ပြမှုများကို လျှပ်စစ်အဆင့် မြင့် နှင့် အနိမ့်တွင် လှုပ်ရှားနိုင်သည်။မြင့်မားသောလျှပ်စစ်အဆင့်သည် တက်ကြွသောအခါ၊ ထိန်းချုပ်မှုအနုတ်လက္ခဏာအချက်ပြမှုများအားလုံးကို GND သို့ ချိတ်ဆက်သွားမည်ဖြစ်သည်။လျှပ်စစ်အဆင့်နိမ့်သည့်အချိန်တွင်၊ ထိန်းချုပ်မှုအပြုသဘောဆောင်သောအချက်ပြမှုများအားလုံးကို အများသူငှာအပေါက်သို့ ချိတ်ဆက်ပေးမည်ဖြစ်သည်။ယခု ဥပမာနှစ်ခုပေး (ဖွင့်စုဆောင်းသူ & PNP) ကျေးဇူးပြု၍ ၎င်းတို့ကို စစ်ဆေးပါ-

ပုံ ၁။ အဝင်ပေါက် ပတ်လမ်း (အပြုသဘောဆောင်သော ချိတ်ဆက်မှု)
PC ချိတ်ဆက်ကိရိယာအထွက်ကိုဖွင့်ပါ။
ပုံ။ 2 အဝင်ပေါက်ပတ်လမ်း (အဆိုးမြင်ချိတ်ဆက်မှု)
PC PNP အထွက်
မှတ်ချက်- VCC=5V၊ R=0 ဘယ်အချိန်မှာ
VCC=12V, R=1K, >1/8W
ဘယ်အချိန်မှာ VCC=24V, R=2K,>1/8W
R သည် control signal အပိုင်းတွင် ချိတ်ဆက်ရပါမည်။
3. Function ရွေးချယ်မှု (ဤလုပ်ဆောင်ချက်ကိုအောင်မြင်ရန် DIP pins ကိုအသုံးပြုခြင်း)
1) Micro step resolution ကို အောက်ပါဇယားတွင်ပြထားသည့်အတိုင်း DIP switch ၏ SW 5,6,7,8 ဖြင့် သတ်မှတ်သည်-
| SW5 | ON | ပိတ်ပါ။ | ON | ပိတ်ပါ။ | ON | ပိတ်ပါ။ | ON | ပိတ်ပါ။ |
| SW6 | ON | ON | ပိတ်ပါ။ | ပိတ်ပါ။ | ON | ON | ပိတ်ပါ။ | ပိတ်ပါ။ |
| SW7 | ON | ON | ON | ON | ပိတ်ပါ။ | ပိတ်ပါ။ | ပိတ်ပါ။ | ပိတ်ပါ။ |
| Pulse/rev | ၂၀၀ | ၄၀၀ | ၈၀၀ | ၁၆၀၀ | ၃၂၀၀ | ၆၄၀၀ | ၁၂၈၀၀ | ၂၅၆၀၀ |
| မိုက်ခရို | 1 | 2 | 4 | 8 | 16 | 32 | 64 | ၁၂၈ |
2) Standstill လက်ရှိဆက်တင်
ဤရည်ရွယ်ချက်အတွက် SW4 ကိုအသုံးပြုသည်။OFF ဟူသော အဓိပ္ပါယ်မှာ ရပ်တန့်နေသော လက်ရှိအား ရွေးချယ်ထားသည့် ရွေ့လျားလျှပ်စီးကြောင်း၏ ထက်ဝက်အဖြစ် သတ်မှတ်ထားပြီး ရပ်တန့်နေသည့် အဓိပ္ပာယ်မှာ ရွေးချယ်ထားသည့် ရွေ့လျားလျှပ်စီးကြောင်းနှင့် တူညီသည်ဟု သတ်မှတ်ထားသည့် ON ဆိုသည့် အဓိပ္ပာယ်ဖြစ်သည်။
3) Output လက်ရှိဆက်တင်:
DIP switch ၏ပထမသုံးဘစ် (SW 1၊ 2၊ 3) ကို dynamic current ကိုသတ်မှတ်ရန်အသုံးပြုသည်။ဆက်တင်တစ်ခုကို ရွေးပါ။
သင့်မော်တာ၏ လိုအပ်သော လျှပ်စီးကြောင်းနှင့် အနီးစပ်ဆုံး
| SW1 | SW2 | SW3 | အမြင့်ဆုံး | RMS |
| ON | ON | ON | 0.44 A | 0.31 A |
| ပိတ်ပါ။ | ON | ON | 0.62 A | 0.44 A |
| ON | ပိတ်ပါ။ | ON | 0.74 A | 0.52 A |
| ပိတ်ပါ။ | ပိတ်ပါ။ | ON | 0.86 A | 0.61 A |
| ON | ON | ပိတ်ပါ။ | 1.46 A | 1.03 A |
| ပိတ်ပါ။ | ON | ပိတ်ပါ။ | 1.69 A | 1.20 A |
| ON | ပိတ်ပါ။ | ပိတ်ပါ။ | 2.14 A | 1.51 A |
| ပိတ်ပါ။ | ပိတ်ပါ။ | ပိတ်ပါ။ | 2.83 A | 2.00 A |
4) Semi-flow function-
Semi-flow function သည် 200 ms ပြီးနောက် step pulse မရှိသောကြောင့်၊ driver output current သည် motor heat ကိုကာကွယ်ရန်အသုံးပြုသော rated output current ၏ 40% သို့ အလိုအလျောက်လျော့ကျသွားပါသည်။
4. မော်တာနှင့် ပါဝါ ပင်များ-
| မော်တာနှင့် ပါဝါတံ | 1 | A+ | မော်တာကြိုးများ | |
| 2 | A- | |||
| 3 | B+ | |||
| 4 | B- | |||
| ၅၊၆ | DC+ DC- | လျှပ်စစ်ဓာတ်အားထုတ်ပေးသောကိရိယာ | ပါဝါထောက်ပံ့မှု : DC12-36VDC အမြင့်ဆုံး input လက်ရှိသည် 2A အထိမဖြစ်နိုင်ပါ။ |
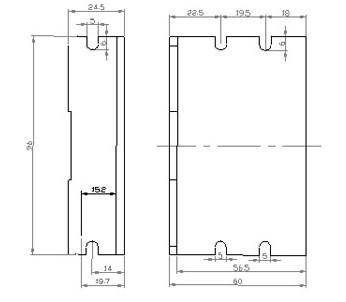
5. စက်ပိုင်းဆိုင်ရာသတ်မှတ်ချက်-
ပတ်လည် 20mm နေရာလွတ်ရှိရန်၊ အခြားအပူပေးစက်များဘေးတွင် ထား၍မရပါ။ထို့အပြင် ဖုန်မှုန့်များ၊ ဆီအငွေ့များ၊ အဆိပ်ဓာတ်ငွေ့များ၊ လေးလံသော စိုထိုင်းဆနှင့် မြင့်မားသောတုန်ခါမှုကို ရှောင်ကြဉ်ပါ။(ယူနစ် = မီလီမီတာ)
6. ပြဿနာဖြေရှင်းခြင်းကို ချိန်ညှိခြင်း။
1) အလင်း၏ညွှန်ပြမှုအခြေအနေ
PWR- အစိမ်းရောင်၊ ပုံမှန်အလုပ်အလင်းရောင်။
ALM- အနီရောင်၊ ချို့ယွင်းချက်အလင်း၊ အဆင့်တို-ဆားကစ်၊ ဗို့အားလွန်မှုနှင့် ဗို့အားအောက်ကာကွယ်မှုပါရှိသော မော်တာ။
2) ဒုက္ခများ
| နှိုးစက်ညွှန်ပြချက် | အကြောင်းပြချက်များ | ဆောင်ရွက်ချက်များ |
| LED အဖွင့် | ပါဝါအတွက် ချိတ်ဆက်မှု မှားယွင်းခြင်း။ | ပါဝါကြိုးများကို စစ်ဆေးပါ။ |
| ပါဝါအတွက် ဗို့အားနိမ့် | ပါဝါဗို့အားချဲ့ပါ။ | |
| torque မထိန်းထားဘဲ မော်တာ မလည်ပတ်ဘူး။ | Stepper motor ၏ မှားယွင်းသောချိတ်ဆက်မှု | ၎င်း၏ဝိုင်ယာကြိုးကိုပြင်ပါ။ |
| အော့ဖ်လိုင်းတွင် RESET အချက်ပြမှုသည် ထိရောက်သည်။ | RESET သည် မထိရောက်ပါ။ | |
| မော်တာ မလည်ပတ်သော်လည်း ထိန်းထားသော torque ကို ထိန်းသိမ်းထားသည်။ | input pulse signal မပါတဲ့ | PMW နှင့် အချက်ပြအဆင့်ကို ချိန်ညှိပါ။ |
| မော်တာသည် ဦးတည်ချက်မှားနေသည်။ | ဝိုင်ယာကြိုးများ ချိတ်ဆက်မှု မှားယွင်းခြင်း။ | ဝါယာကြိုး 2 ကြိုးမှ ချိတ်ဆက်မှုကို ပြောင်းပါ။ |
| မှားယွင်းထည့်သွင်းမှု ဦးတည်ချက်အချက်ပြမှု | ဦးတည်ချက် ဆက်တင်ကို ပြောင်းပါ။ | |
| မော်တာ၏ ကိုင်ဆွဲအားသည် သေးငယ်လွန်းသည်။ | လက်ရှိဆက်တင်နှင့် နှိုင်းယှဉ်လျှင် အလွန်သေးငယ်သည်။ | အဆင့်သတ်မှတ်ထားသော လက်ရှိဆက်တင်ကို မှန်ကန်စေသည်။ |
| အရှိန်က အရမ်းမြန်တယ်။ | အရှိန်လျှော့ပါ။ | |
| မော်တော်ဆိုင်များ | စက်ပိုင်းဆိုင်ရာ ချို့ယွင်းမှုကို ဖယ်ရှားပါ။ | |
| ယာဉ်မောင်းသည် မော်တာနှင့် မကိုက်ညီပါ။ | သင့်လျော်သောယာဉ်မောင်းကိုပြောင်းပါ။ |
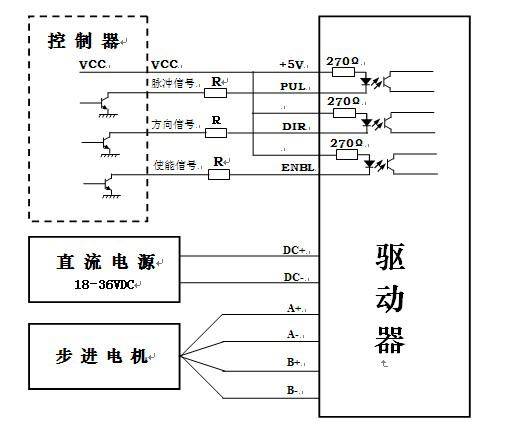
7. Driver ဝိုင်ယာကြိုးများ
ပြီးပြည့်စုံသော stepper မော်တာထိန်းချုပ်မှုစနစ်တွင် stepper drives၊ DC power supply နှင့် controller (pulse source) ပါဝင်သင့်သည်။အောက်ဖော်ပြပါသည် ပုံမှန်စနစ်ဝါယာကြိုးပုံဖြစ်သည်။