Introdução:
DM420A é um tipo de driver de motor de passo híbrido bifásico, cuja tensão de acionamento é de 12VDC a 36VDC.Ele foi projetado para uso com motor de passo híbrido bifásico de todos os tipos, com diâmetro externo de 20 mm a 42 mm e corrente de fase inferior a 2,0A.Este circuito que adota é semelhante ao circuito de servocontrole que permite ao motor funcionar suavemente quase sem ruídos e vibrações.O torque máximo quando o DM420A funciona em alta velocidade também é significativamente maior do que o outro driver bifásico, além do mais, a precisão de posicionamento também é maior.É amplamente utilizado em dispositivos de controle numérico de médio e grande porte, como máquinas curvadoras, máquinas CNC e máquinas de bordar de computador, máquinas de embalagem e assim por diante.
Características:
l Alto desempenho, baixo preço
l Controle de corrente média, acionamento de corrente de saída senoidal bifásica
l Tensão de alimentação de 12VDC a 36VDC
l E/S de sinal opto-isolado
l Sobretensão, subtensão, sobrecorreção, proteção contra curto-circuito de fase
l Subdivisão de 8 canais e redução automática da corrente ociosa
l Configuração de corrente de fase de saída de 8 canais
l Terminal de entrada de comando offline
l O torque do motor está relacionado à velocidade, mas não ao passo/revolução
l Alta velocidade de partida
l Alto torque de hording em alta velocidade
Especificação elétrica:
| Tensão de entrada | 12-36 VCC |
| Corrente de entrada | <2A |
| Corrente de saída | 0,44A-2,83A |
| Consumo | Consumo:40W; |
| Temperatura | Temperatura de trabalho -10~45℃;Temperatura de estocagem -40℃~70℃ |
| Umidade | Sem condensação, sem gotas de água |
| gás | Proibição de gases combustíveis e poeira condutiva |
| peso | 70G |
Atribuições e descrição dos pinos:
1) Configurações dos pinos do conector
| Função de pino | Detalhes |
| PUL +, PUL- | Sinal de pulso, PUL+ é a extremidade positiva do pino de entrada de pulsoPUL- é a extremidade negativa do pino de entrada de pulso |
| DIR+,DIR- | Sinal DIR: DIR+ é a extremidade positiva do pino de entrada de direçãoDIR- é a extremidade negativa do pino de entrada de direção |
| ENBL+ | Sinal de habilitação: ENBL+ é a extremidade positiva do pino de entrada de direção.Este sinal é utilizado para habilitar/desabilitar o driver.Nível alto para habilitar o driver e nível baixo para desabilitar o driver. |
| ENBL- | ENBL- é o terminal negativo do pino de entrada de direção.Geralmente deixado desconectado (ativado) |
2) Diagrama de fiação dos pinos:
Os sinais de controle do PC podem estar ativos em níveis elétricos altos e baixos.Quando o nível elétrico alto estiver ativo, todos os sinais negativos de controle serão conectados juntos ao GND.Quando o nível elétrico baixo estiver ativo, todos os sinais positivos de controle serão conectados juntos à porta pública.Agora dê dois exemplos (coletor aberto e PNP), verifique-os:

Fig 1. Circuito da porta de entrada (conexão positiva)
Saída de conector aberto do PC
Fig. 2 Circuito da porta de entrada (conexão negativa)
Saída PC PNP
Nota: Quando VCC=5V, R=0
Quando VCC=12V, R=1K, >1/8W
Quando VCC=24V, R=2K,>1/8W
R deve ser conectado na parte do sinal de controle.
3. Escolha da função (usando pinos DIP para alcançar esta função)
1) A resolução do micropasso é definida pelo SW 5,6,7,8 da chave DIP conforme mostrado na tabela a seguir:
| SW5 | ON | DESLIGADO | ON | DESLIGADO | ON | DESLIGADO | ON | DESLIGADO |
| SW6 | ON | ON | DESLIGADO | DESLIGADO | ON | ON | DESLIGADO | DESLIGADO |
| SW7 | ON | ON | ON | ON | DESLIGADO | DESLIGADO | DESLIGADO | DESLIGADO |
| Pulso/rotação | 200 | 400 | 800 | 1600 | 3200 | 6400 | 12.800 | 25600 |
| Micro | 1 | 2 | 4 | 8 | 16 | 32 | 64 | 128 |
2) Configuração de corrente parada
SW4 é usado para esta finalidade.OFF significa que a corrente de parada está definida como metade da corrente dinâmica selecionada e ON significa que a parada está definida para ser igual à corrente dinâmica selecionada.
3) Configuração da corrente de saída:
Os primeiros três bits (SW 1, 2, 3) da chave DIP são usados para definir a corrente dinâmica.Selecione uma configuração
Mais próximo da corrente necessária do seu motor
| SW1 | SW2 | SW3 | PICO | RMS |
| ON | ON | ON | 0,44A | 0,31A |
| DESLIGADO | ON | ON | 0,62A | 0,44A |
| ON | DESLIGADO | ON | 0,74A | 0,52A |
| DESLIGADO | DESLIGADO | ON | 0,86A | 0,61A |
| ON | ON | DESLIGADO | 1,46A | 1,03A |
| DESLIGADO | ON | DESLIGADO | 1,69A | 1,20 A |
| ON | DESLIGADO | DESLIGADO | 2.14A | 1,51A |
| DESLIGADO | DESLIGADO | DESLIGADO | 2,83 A | 2,00 A |
4) Função semi-fluxo:
A função de semifluxo é que não há pulso de passo após 200 ms, a corrente de saída do driver é automaticamente reduzida para 40% da corrente de saída nominal, que é usada para evitar o aquecimento do motor.
4. Pinos do motor e potência:
| Pinos de motor e potência | 1 | A+ | Fiação de motores | |
| 2 | A- | |||
| 3 | B+ | |||
| 4 | B- | |||
| 5,6 | CC+ CC- | Fonte de energia | Fonte de alimentação: DC12-36VDCA corrente de entrada de pico não pode ser de até 2A |
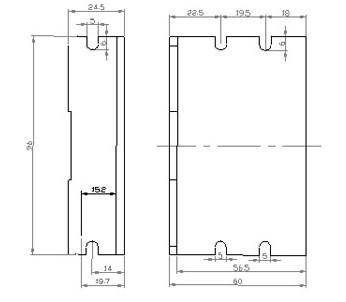
5. Especificação Mecânica:
Para ter 20 mm de espaço ao redor, não pode ser colocado próximo a outros dispositivos de aquecimento.Além do mais, evite poeira, névoa de óleo, gases corrosivos, alta umidade e alta vibração.(Unidade=mm)
6. Ajuste de solução de problemas
1), o status da indicação da luz
PWR: verde, luz de trabalho normal.
ALM: vermelho, luz de falha, motor com proteção contra curto-circuito de fase, sobretensão e subtensão.
2) Problemas
| Indicador de alarme | Razões | Medidas |
| LED apagado | Conexão errada para energia | Verifique a fiação de energia |
| Baixas tensões para energia | Aumentar a tensão de energia | |
| O motor não funciona, sem manter o torque | Conexão errada do motor de passo | Corrija sua fiação |
| O sinal RESET é eficaz quando offline | Tornar RESET ineficaz | |
| O motor não funciona, mas mantém o torque de retenção | Sem sinal de pulso de entrada | Ajustar PMW e nível de sinal |
| O motor funciona na direção errada | Conexão de fios errada | Altere a conexão para qualquer um dos 2 fios |
| Sinal de direção de entrada errado | Alterar configuração de direção | |
| O torque de retenção do motor é muito pequeno | Muito pequeno em relação à configuração atual | Configuração correta da corrente nominal |
| A aceleração é muito rápida | Reduza a aceleração | |
| Motor parado | Descarte falha mecânica | |
| O driver não combina com o motor | Mude um driver adequado |
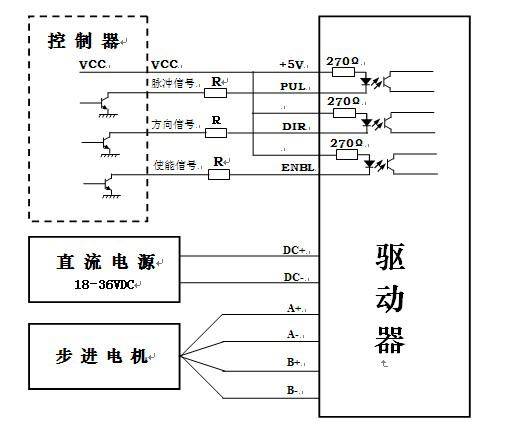
7. Fiação do driver
Um sistema completo de controle de motor de passo deve conter drives de passo, fonte de alimentação CC e controlador (fonte de pulso).A seguir está um diagrama típico de fiação do sistema