Ներածություն:
DM420A-ն երկփուլ հիբրիդային քայլող շարժիչի մի տեսակ է, որի շարժիչ լարումը 12VDC-ից մինչև 36VDC է:Այն նախատեսված է 20 մմ-ից մինչև 42 մմ արտաքին տրամագծով և 2.0A-ից պակաս ֆազային հոսանքի 2 փուլային հիբրիդային ստեպպեր շարժիչի հետ օգտագործելու համար:Այս սխեման, որը նա ընդունում է, նման է servo հսկողության միացմանը, որը թույլ է տալիս շարժիչին սահուն աշխատել գրեթե առանց աղմուկի և թրթռումների:Հորդորման ոլորող մոմենտը, երբ DM420A-ն աշխատում է բարձր արագությամբ, նույնպես զգալիորեն ավելի բարձր է, քան մյուս երկֆազ շարժիչը, ավելին, դիրքավորման ճշգրտությունը նույնպես ավելի բարձր է:Այն լայնորեն օգտագործվում է միջին և մեծ չափի թվային կառավարման սարքերում, ինչպիսիք են կորի մեքենան, CNC մեքենան և համակարգչային ասեղնագործող մեքենան, փաթեթավորման մեքենաները և այլն:
Հատկություններ:
l Բարձր կատարողականություն, ցածր գին
l Միջին հոսանքի կառավարում, 2-փուլ սինուսոիդային ելքային հոսանքի շարժիչ
լ Մատակարարման լարումը 12VDC-ից մինչև 36VDC
l Օպտո-մեկուսացված ազդանշան I/O
լ Գերլարման, լարման տակ, գերճիշտ, փուլային կարճ միացումից պաշտպանություն
l 8 ալիքների ենթաբաժանում և անգործության հոսանքի ավտոմատ կրճատում
լ 8 ալիքների ելքային փուլային ընթացիկ կարգավորում
l Անցանց հրամանի մուտքագրման տերմինալ
l Շարժիչի ոլորող մոմենտը կապված է արագության հետ, բայց կապված չէ քայլի/պտույտի հետ
l Գործարկման բարձր արագություն
l Բարձր արագությամբ պտտվող ոլորող մոմենտ
Էլեկտրական բնութագրեր.
| Մուտքային լարումը | 12-36VDC |
| Մուտքային հոսանք | < 2A |
| Ելքային հոսանք | 0,44Ա- 2,83Ա |
| Սպառումը | Սպառումը:40 Վտ; |
| Ջերմաստիճանը | Աշխատանքային ջերմաստիճան -10-45℃;Պահեստավորման ջերմաստիճան -40℃-70℃ |
| Խոնավություն | Ոչ խտացում, ոչ ջրի կաթիլ |
| գազ | Այրվող գազերի և հաղորդիչ փոշու արգելում |
| քաշը | 70 գ |
Կապում հանձնարարություններ և նկարագրություն.
1) Միակցիչների կապում կոնֆիգուրացիաներ
| Pin գործառույթը | Մանրամասներ |
| PUL +, PUL- | Զարկերակային ազդանշան, PUL+-ը իմպուլսների մուտքագրման պին-ի դրական վերջն է: |
| DIR+, DIR- | DIR ազդանշան. DIR+-ը ուղղության մուտքի պինդի դրական վերջն է DIR-ը ուղղության մուտքագրման պինդի բացասական վերջն է |
| ENBL+ | Միացնել ազդանշանը. ENBL+-ը ուղղության մուտքագրման փին դրական վերջն է:Այս ազդանշանն օգտագործվում է վարորդը միացնելու/անջատելու համար:Բարձր մակարդակ՝ վարորդին միացնելու համար և ցածր մակարդակ՝ վարորդին անջատելու համար: |
| ENBL- | ENBL- ուղղության մուտքագրման փին բացասական վերջն է:Սովորաբար մնում է առանց կապի (միացված) |
2) կապում էլեկտրագծերի դիագրամ.
ԱՀ-ի կառավարման ազդանշանները կարող են ակտիվ լինել բարձր և ցածր էլեկտրական մակարդակներում:Երբ բարձր էլեկտրական մակարդակը ակտիվ է, բոլոր հսկիչ բացասական ազդանշանները միասին կմիացվեն GND-ին:Երբ ցածր էլեկտրական մակարդակն ակտիվ է, բոլոր հսկիչ դրական ազդանշանները կմիացվեն հանրային պորտին:Այժմ բերեք երկու օրինակ (Բաց կոլեկցիոներ և PNP), խնդրում ենք ստուգել դրանք.

Նկար 1. Մուտքային պորտի միացում (Դրական միացում)
ԱՀ բաց միակցիչի ելք
Նկար 2 Մուտքային պորտի միացում (բացասական միացում)
PC PNP ելք
Նշում. Երբ VCC=5V, R=0
Երբ VCC=12V, R=1K, >1/8W
Երբ VCC=24V, R=2K,>1/8W
R-ը պետք է միանա կառավարման ազդանշանի մասում:
3. Գործառույթի ընտրություն (Այս ֆունկցիան հասնելու համար օգտագործելով DIP կապում)
1) Միկրո քայլ լուծումը սահմանվում է DIP անջատիչի SW 5,6,7,8-ով, ինչպես ցույց է տրված հետևյալ աղյուսակում.
| SW5 | ON | ԱՆՋԱՏՎԱԾ | ON | ԱՆՋԱՏՎԱԾ | ON | ԱՆՋԱՏՎԱԾ | ON | ԱՆՋԱՏՎԱԾ |
| SW6 | ON | ON | ԱՆՋԱՏՎԱԾ | ԱՆՋԱՏՎԱԾ | ON | ON | ԱՆՋԱՏՎԱԾ | ԱՆՋԱՏՎԱԾ |
| SW7 | ON | ON | ON | ON | ԱՆՋԱՏՎԱԾ | ԱՆՋԱՏՎԱԾ | ԱՆՋԱՏՎԱԾ | ԱՆՋԱՏՎԱԾ |
| Զարկերակ / շրջադարձ | 200 թ | 400 | 800 թ | 1600 թ | 3200 թ | 6400 թ | 12800 թ | 25600 |
| Միկրո | 1 | 2 | 4 | 8 | 16 | 32 | 64 | 128 |
2) Standstill ընթացիկ կարգավորում
Այս նպատակով օգտագործվում է SW4:OFF նշանակում է, որ կանգառի հոսանքը սահմանվել է որպես ընտրված դինամիկ հոսանքի կեսը, իսկ ON՝ նշանակում է, որ կանգառը նույնն է, ինչ ընտրված դինամիկ հոսանքը:
3) Ելքային հոսանքի կարգավորում.
DIP անջատիչի առաջին երեք բիթերը (SW 1, 2, 3) օգտագործվում են դինամիկ հոսանքը սահմանելու համար:Ընտրեք պարամետր
Ձեր շարժիչի պահանջվող հոսանքին ամենամոտ
| SW1 | SW2 | SW3 | ՊԵԿ | RMS |
| ON | ON | ON | 0,44 Ա | 0,31 Ա |
| ԱՆՋԱՏՎԱԾ | ON | ON | 0,62 Ա | 0,44 Ա |
| ON | ԱՆՋԱՏՎԱԾ | ON | 0,74 Ա | 0,52 Ա |
| ԱՆՋԱՏՎԱԾ | ԱՆՋԱՏՎԱԾ | ON | 0,86 Ա | 0,61 Ա |
| ON | ON | ԱՆՋԱՏՎԱԾ | 1.46 Ա | 1.03 Ա |
| ԱՆՋԱՏՎԱԾ | ON | ԱՆՋԱՏՎԱԾ | 1.69 Ա | 1.20 Ա |
| ON | ԱՆՋԱՏՎԱԾ | ԱՆՋԱՏՎԱԾ | 2.14 Ա | 1.51 Ա |
| ԱՆՋԱՏՎԱԾ | ԱՆՋԱՏՎԱԾ | ԱՆՋԱՏՎԱԾ | 2,83 Ա | 2.00 Ա |
4) կիսահոսքի ֆունկցիա.
Կիսահոսքի ֆունկցիան այն է, որ 200 ms-ից հետո քայլային զարկերակ չկա, վարորդի ելքային հոսանքը ավտոմատ կերպով կրճատվում է մինչև անվանական ելքային հոսանքի 40%-ը, որն օգտագործվում է շարժիչի ջերմությունը կանխելու համար:
4. Շարժիչի և հզորության միններ.
| Շարժիչի և հոսանքի կապում | 1 | A+ | Շարժիչների էլեկտրալարեր | |
| 2 | A- | |||
| 3 | B+ | |||
| 4 | B- | |||
| 5,6 | DC+ DC- | Էլեկտրամատակարարում | Էլեկտրաէներգիայի մատակարարում :DC12-36VDC Մուտքի առավելագույն հոսանքը չի կարող լինել մինչև 2A |
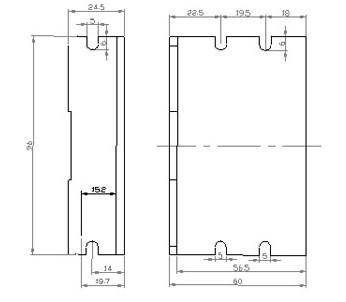
5. Մեխանիկական Տեխնիկական:
Շուրջ 20 մմ տարածություն ունենալու համար հնարավոր չէ տեղադրել այլ ջեռուցման սարքերի կողքին:Ավելին, խուսափեք փոշուց, նավթի մառախուղից, քայքայիչ գազից, ուժեղ խոնավությունից և բարձր թրթռումներից:(Միավոր = մմ)
6. Անսարքությունների վերացման կարգավորում
1) , կարգավիճակը լուսացույցի վրա
PWR՝ կանաչ, նորմալ աշխատանքային լույս:
ԱԼՄ՝ կարմիր, խափանման լույս, շարժիչը փուլային կարճ միացումով, գերլարման և թերլարման պաշտպանությամբ:
2) դժվարություններ
| Տագնապային ցուցիչ | Պատճառները | Միջոցառումներ |
| LED անջատում | Սխալ միացում իշխանության համար | Ստուգեք հոսանքի լարերը |
| Ցածր լարումներ հոսանքի համար | Մեծացնել հոսանքի լարումը | |
| Շարժիչը չի աշխատում՝ առանց պահելու ոլորող մոմենտը | Ստեպպերի շարժիչի սխալ միացում | Ուղղեք դրա լարերը |
| RESET ազդանշանն արդյունավետ է, երբ անցանց է | Դարձրեք RESET-ը անարդյունավետ | |
| Շարժիչը չի աշխատում, բայց պահպանում է պահման ոլորող մոմենտը | Առանց մուտքային իմպուլսային ազդանշանի | Կարգավորեք PMW և ազդանշանի մակարդակը |
| Շարժիչը սխալ ուղղությամբ է աշխատում | Լարերի սխալ միացում | Փոխեք կապը 2 լարերից որևէ մեկի համար |
| Մուտքի ուղղության սխալ ազդանշան | Փոխել ուղղության կարգավորումը | |
| Շարժիչի պահման մոմենտը չափազանց փոքր է | Ընթացիկ պարամետրերի համեմատ չափազանց փոքր է | Ճիշտ գնահատված ընթացիկ կարգավորումը |
| Արագացումը չափազանց արագ է | Նվազեցրեք արագացումը | |
| Շարժիչային կրպակներ | Բացառեք մեխանիկական ձախողումը | |
| Վարորդը չի համապատասխանում շարժիչին | Փոխեք համապատասխան վարորդը |
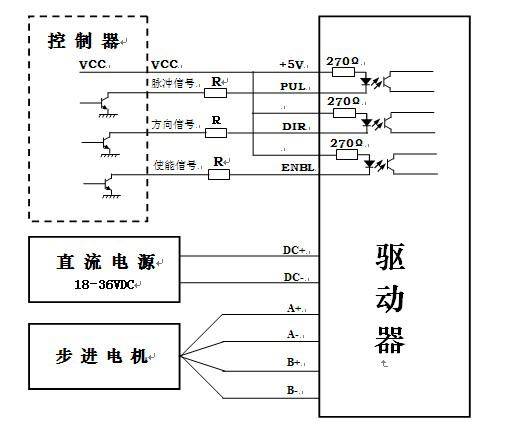
7. Վարորդի լարերը
Ամբողջական աստիճանային շարժիչի կառավարման համակարգը պետք է պարունակի ստեպեր կրիչներ, մշտական հոսանքի մատակարարում և կարգավորիչ (զարկերակային աղբյուր):Ստորև ներկայացված է համակարգի միացման տիպիկ դիագրամ